PTA习题:Data Structures and Algorithms (English)1

需积分: 0 139 浏览量
更新于2022-08-08
收藏 388KB DOCX 举报
【知识点详解】
在给定的PTA习题中,我们主要关注的是图论中的两个问题:最短路径问题。这两个问题都是关于找到无向图(第一个问题)或有向图(第二个问题)中从源顶点到所有其他顶点的最短路径。以下是相关的知识点:
1. **图数据结构**:
- 在这两个问题中,图被表示为邻接表(Adjacency List)的形式。邻接表是一种存储图的方式,它为每个顶点维护一个链表,链表中的节点表示与该顶点相邻的边。
- `LGraph` 和 `MGraph` 是定义图结构的两种类型,分别用于无权图和有权图。`LGraph` 包含顶点数 `Nv`,边数 `Ne`,以及一个 `AdjList` 数组来存储邻接关系。
- `AdjVNode` 结构体表示邻接表中的节点,包含相邻的顶点 `AdjV` 和指向下一个邻接节点的指针 `Next`。
- `AdjList` 是一个数组,每个元素都是一个 `PtrToAdjVNode` 指针,表示顶点的邻接链表。
2. **最短路径算法**:
- 第一个问题要求找到无权图的最短路径,这通常可以使用 Bellman-Ford 算法或 BFS(广度优先搜索)解决。由于题目没有提到边的权重,BFS 是一个合适的解决方案,因为它可以找到无权图的最短路径。
- 第二个问题是带权重的最短路径问题,可以使用 Dijkstra 算法或 Bellman-Ford 算法解决。由于题目保证所有权重都是正的,Dijkstra 算法是更高效的选择,它使用贪心策略,每次选择当前未访问顶点中距离源顶点最近的一个进行扩展。
3. **算法实现**:
- 在给出的示例程序中,`ShortestDist` 函数是实现最短路径算法的地方。对于无权图,`ShortestDist` 可能会使用 BFS;对于有权图,可能会使用 Dijkstra 算法。
- `ReadG()` 函数负责读取图的输入,但其具体实现细节被省略了。在实际应用中,这个函数可能需要处理输入格式,例如读取顶点数、边数和边的连接关系。
- `main` 函数中,首先读取图 `G`,然后获取源顶点 `S`,调用 `ShortestDist` 计算最短距离,并将结果打印出来。
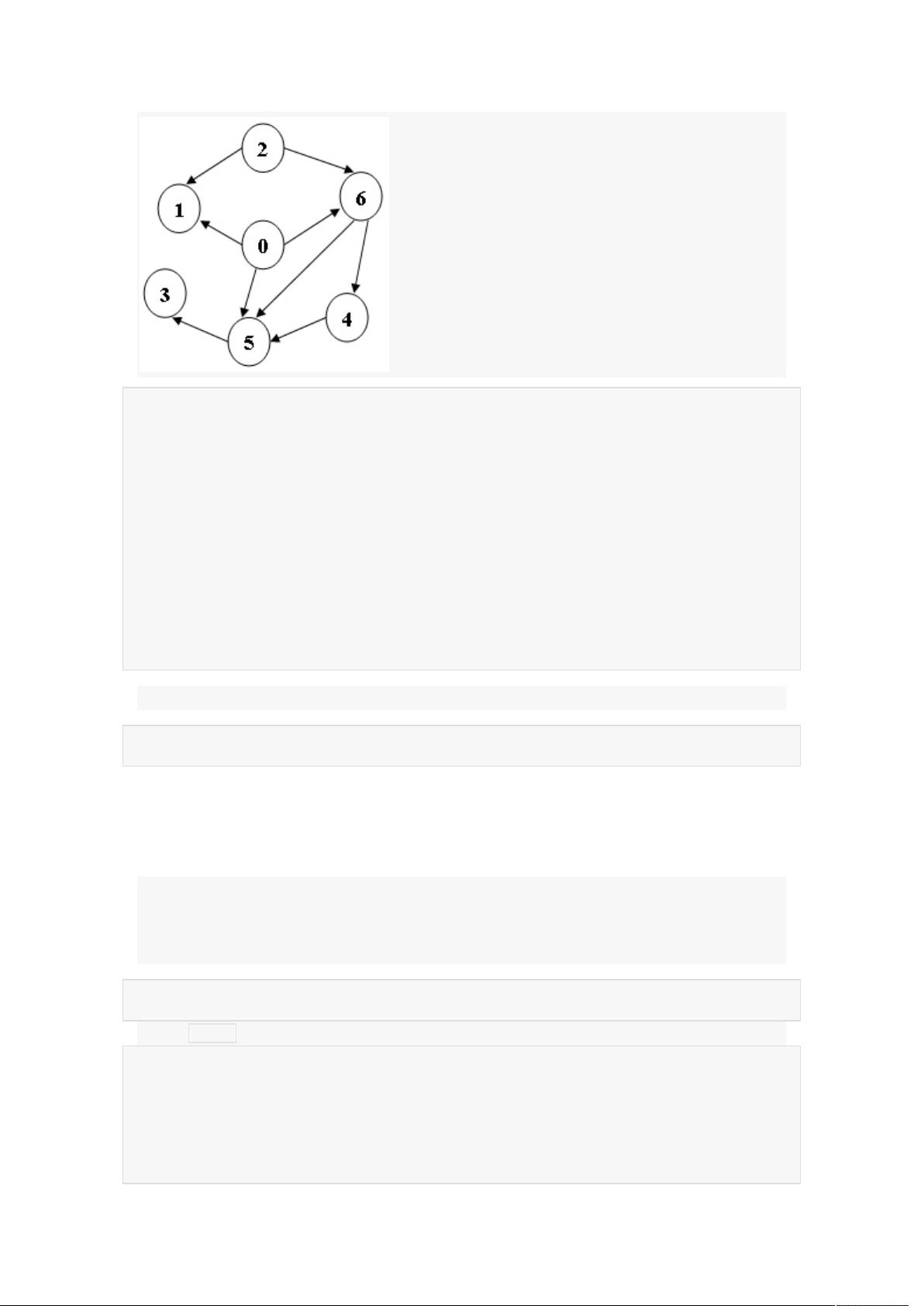
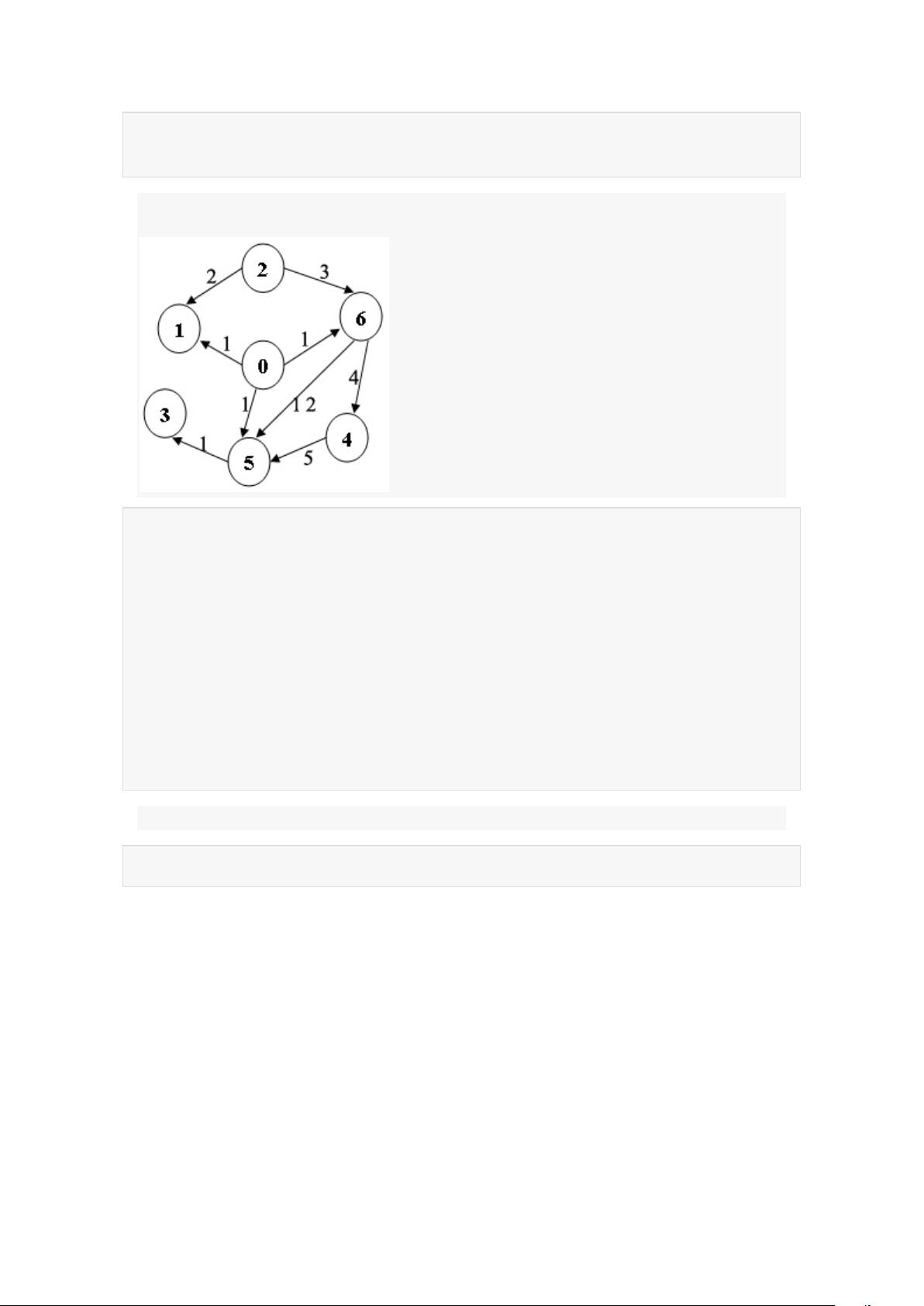
4. **样例输入和输出**:
- 样例输入给出了一个图的顶点数和边数,以及一系列边的连接信息(在问题2中还有边的权重)。在问题1的样例输出中,-1 表示顶点无法从源顶点到达,其余数字表示从源顶点到相应顶点的最短距离。
- 样例输出显示了计算出的最短距离数组,对应于输入图的每个顶点。
5. **编程语言**:
- 这些习题使用 C 语言编写,涉及到的基本编程概念包括结构体、指针、数组、函数等。
理解这些知识点是解答这两个PTA习题的关键。对于实际编程时,需要注意正确地实现图数据结构、选择适当的最短路径算法,以及正确处理输入和输出。同时,确保代码的效率和正确性是至关重要的。
6-11 Shortest Path [1] (25 分)
Write a program to find the unweighted shortest distances from any vertex to a given
source vertex in a digraph.
Format of functions:
void ShortestDist( LGraph Graph, int dist[], Vertex S );
where LGraph is defined as the following:
typedef struct AdjVNode *PtrToAdjVNode;
struct AdjVNode{
Vertex AdjV;
PtrToAdjVNode Next;
};
typedef struct Vnode{
PtrToAdjVNode FirstEdge;
} AdjList[MaxVertexNum];
typedef struct GNode *PtrToGNode;
struct GNode{
int Nv;
int Ne;
AdjList G;
};
typedef PtrToGNode LGraph;
The shortest distance from V to the source S is supposed to be stored in dist[V]. If V
cannot be reached from S, store -1 instead.
Sample program of judge:
#include <stdio.h>
#include <stdlib.h>
typedef enum {false, true} bool;
#define MaxVertexNum 10 /* maximum number of vertices */
typedef int Vertex; /* vertices are numbered from 0 to MaxVertexNum-1 */
typedef struct AdjVNode *PtrToAdjVNode;
struct AdjVNode{
Vertex AdjV;
剩余22页未读,继续阅读
2018-03-13 上传
2019-07-11 上传
192 浏览量
124 浏览量
2011-12-16 上传
139 浏览量
159 浏览量
2013-08-17 上传
2018-04-24 上传
201 浏览量
145 浏览量
2021-03-10 上传
资源评论


CyberNinja
- 粉丝: 29
- 资源: 297









最新资源
- HEVC多视图编码多层次复杂度优化:运动估计与并行处理技术的应用
- 电源Simplis开关电源及电路仿真案例 单 多相控制buck仿真电路 4 8 phase COT D-CAP+ 架构仿真模型, 1-8phase PWM buck仿真模型, 峰值电流模式,D-C
- ExchangeServer2003邮件安全指南PDF版最新版本
- 线性参变(LPV)+输出反馈鲁棒模型预测控制(OFRMPC)+路径跟踪(PTC),目前能实现20-25m s的变速单移线,更多工况可自行调试 考虑速度和侧偏刚度变化,以及质心侧偏角的鲁棒估计,基于二
- 红帽企业Linux3(安全、安装、系统)指南CHM版最新版本
- adaline神经网络辨识永磁同步电机参数
- 基于机器学习的快速CU划分方法减少HEVC复杂度的研究
- UNIX系统安全工具PDF版最新版本
- 储能参与调峰调频联合优化模型 关键词:储能 调频 调峰 充放电优化 联合运行 matlab运行 参考文档:Using Battery Storage for Peak Shaving and Fr
- 基于感知模型的高效视频编码实时率失真优化(HEVC)
- OTFS仿真 MIMO-OTFS MP检测算法(详细注释),ZF均衡,低复杂度lu分解和误差纠正mmse均衡检测 omp及基本信道估计,MRC检测,结合索引调制IM,空间调制SM,正交空间调制,SM
- COMSOL二维三维岩石裂隙开度及裂隙渗透率变化模型 流固与热流固耦合均有
- 2017年暑假参加电赛在ROS平台上完成的四旋翼无人机飞行控制代码以及视觉识别部分。.zip
- APP基于DJI Mobile SDK,实现了获取和释放遥控器的控制权限、模拟遥控器的飞行控制操作、.zip
- Kendryte K210人工智能芯片应用程序集合,包括人脸检测、颜色检测、目标检测和分类、二维码和.zip
- ROS中集成各类无人机应用,并全部工程部署至Nvidia Xavier NX2,算法包括:Yolo系.zip
