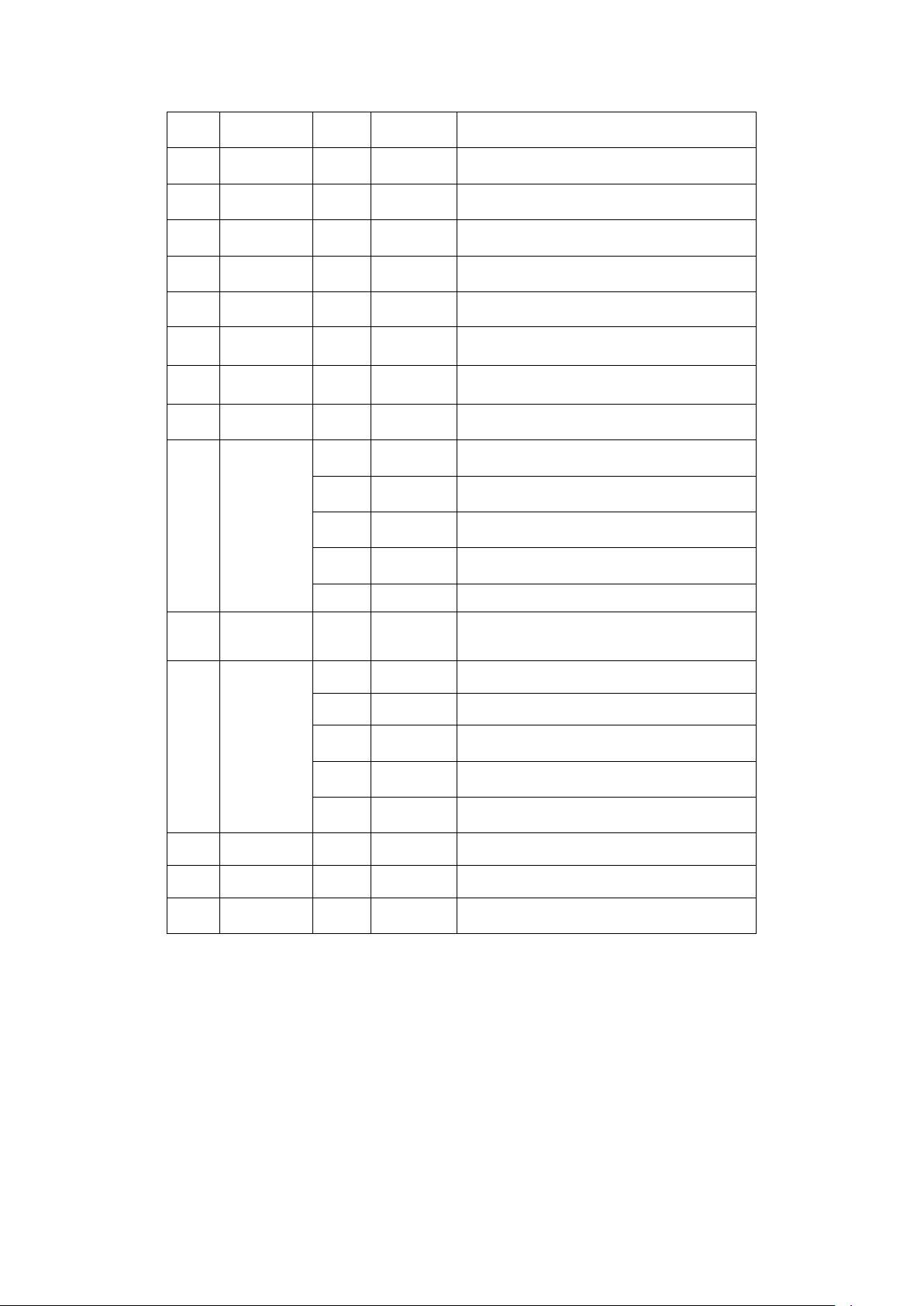
数据输出帧格式1是用于传输传感器数据的一种结构化格式,主要应用于人工智能领域的设备或系统,如无人机、自动驾驶车辆等,这些设备通常需要实时处理多种传感器数据。以下是对该帧格式的详细解读:
1. **帧头**:帧头是每个数据包的起始标识,由特定的字节序列构成,这里是`40x AA 55 AA 56`。这个序列用来识别数据的开始,确保数据在传输过程中的正确性和完整性。
2. **时间戳**:以秒为单位的时间戳占据4个字节,记录了数据生成的精确时间,对于实时处理和数据分析至关重要。
3. **陀螺(Gyro)**:陀螺仪数据提供了设备的角速度信息,单位是°/s,包括x、y、z三个轴的值,分别代表右前上的三个方向,用于检测设备的旋转运动。
4. **加计(Accm)**:加速度计数据,单位是m/s²,同样包括x、y、z三个轴的值,用于检测设备在三维空间中的线性加速度,帮助确定设备的位置和姿态。
5. **磁力计(MagnuT)**:磁力计数据提供了地球磁场强度,单位也是x、y、z三个轴的值,用于确定设备的方向和航向。
6. **Hbarmbar**:气压计读数,单位是毫巴,用于计算高度和气压变化,对飞行器的飞行高度控制和导航很重要。
7. **Att 姿态**:姿态数据包含了Pitch(俯仰)、Roll(翻滚)和Yaw(偏航)三个角度,每个角度占据12个字节,用于描述设备相对于地平面的倾斜和旋转状态。
8. **Vn 速度**:速度信息,包括东、北、向上的分量,单位为m/s,用于追踪设备的移动速度和方向。
9. **经纬度 Lon/Lat**:经纬度数据分别表示经度和纬度,分为整数和小数部分,用于确定设备的地理位置。
10. **Pos 位置**:位置信息,以米为单位,表示设备的三维坐标位置。
11. **GPSVn 速度**和**GPS_Pos 位置**:这两项与Vn和Pos类似,但来源于GPS定位系统,提供更准确的位置和速度信息。
12. **GPS_status**:这是一个四位字段,其中包含定位卫星的数量乘以1000再加上定位质量指标PDOP(定位精度几何因子),当PDOP大于99时,输出为99。
13. **GPS_delays**:GPS输出延迟时间,以4个字节表示,反映了从数据采集到发送之间的延迟。
14. **温度**:传感器或系统的温度数据,单位为摄氏度,用于监控设备运行环境的温度状况。
这种数据输出帧格式设计得非常全面,包含了从运动状态、位置信息到环境参数的多个方面,为人工智能系统提供了丰富的数据源,便于进行复杂的分析和决策。在实际应用中,这样的数据通常会被实时解析并输入到机器学习模型中,以便进行预测、控制或其他智能操作。














评论0