04_SLAM定位(位姿变换)+建图(地图点)1
需积分: 0 33 浏览量
2022-08-03
11:40:31
上传
评论
收藏 7.77MB PDF 举报


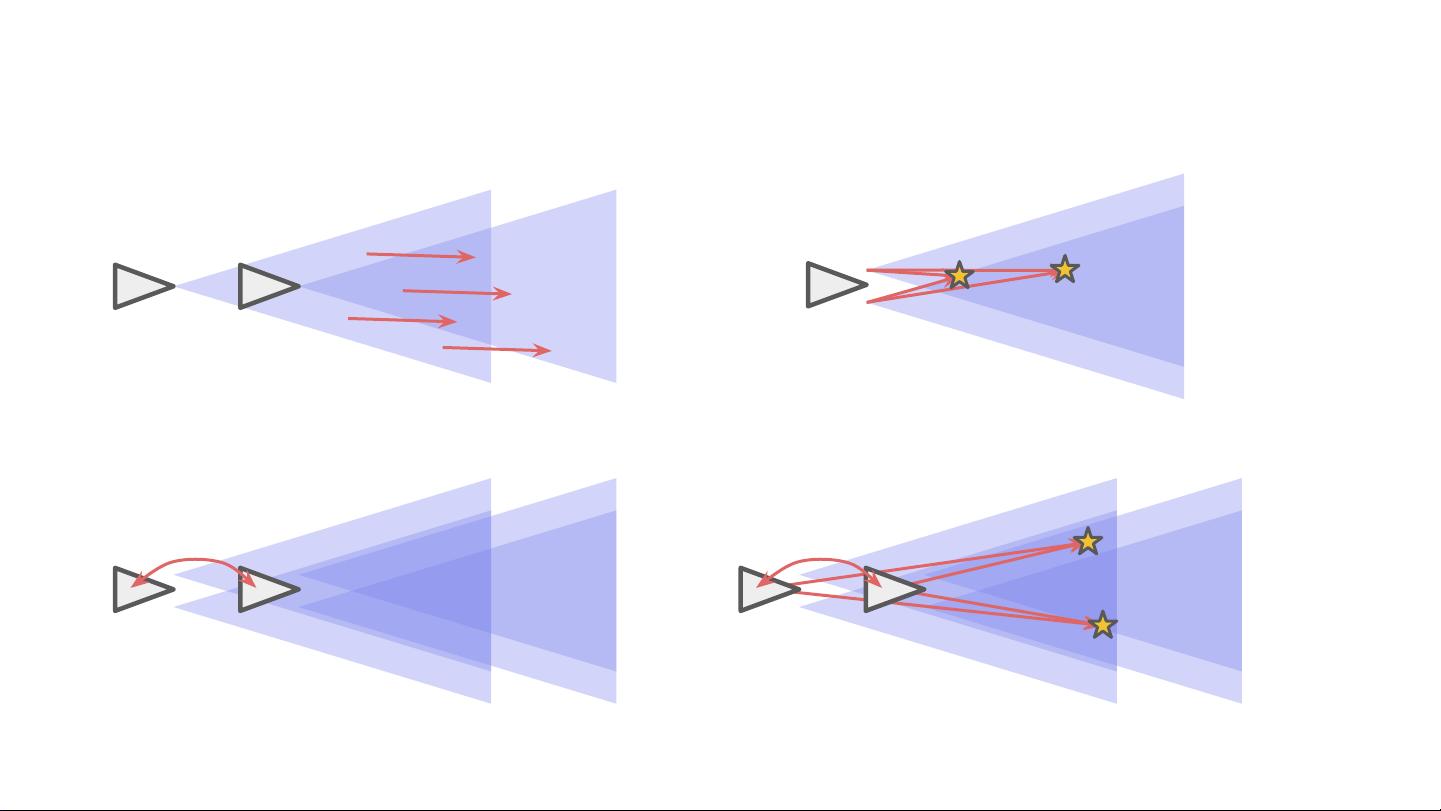
SLAM
Simultaneous Localization and Mapping
CSC 2541 -- Visual Perception for Autonomous Driving
Presented by Kirk MacTavish

剩余70页未读,继续阅读

史努比狗狗
- 粉丝: 27
- 资源: 318









最新资源
- 藏区特产销售平台源代码+论文+毕业设计.zip
- B297C8EC5A69641DB3E681E1B3F894E5.mp4
- PrimitivesPro v2.2.unitypackage
- 财务管理系统源代码+论文.zip
- 高级信息通信运行管理员第七套试卷
- UModeler v2.11.6 (May 10, 2024).unitypackage
- 基于Selenium的Java爬虫实战(内含谷歌浏览器Chrom和Chromedriver版本127.0.6486.0)
- 基于FPGA的CORDIC算法旋转模式实现
- bilibili视频解析下载源码
- 基于Selenium的Java爬虫实战(内含谷歌浏览器Chrom和Chromedriver版本124.0.6367.60)
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论0