Lec11-摄像机参数矩阵1
需积分: 0 95 浏览量
2022-08-04
12:17:26
上传
评论
收藏 2.32MB PDF 举报


2018/5/30
1
计算机视觉与模式识别
苏远歧,新型计算机研究所
Hyun Soon Park, University of Minnesota
Jianbo Shi, University of Pennsylvania
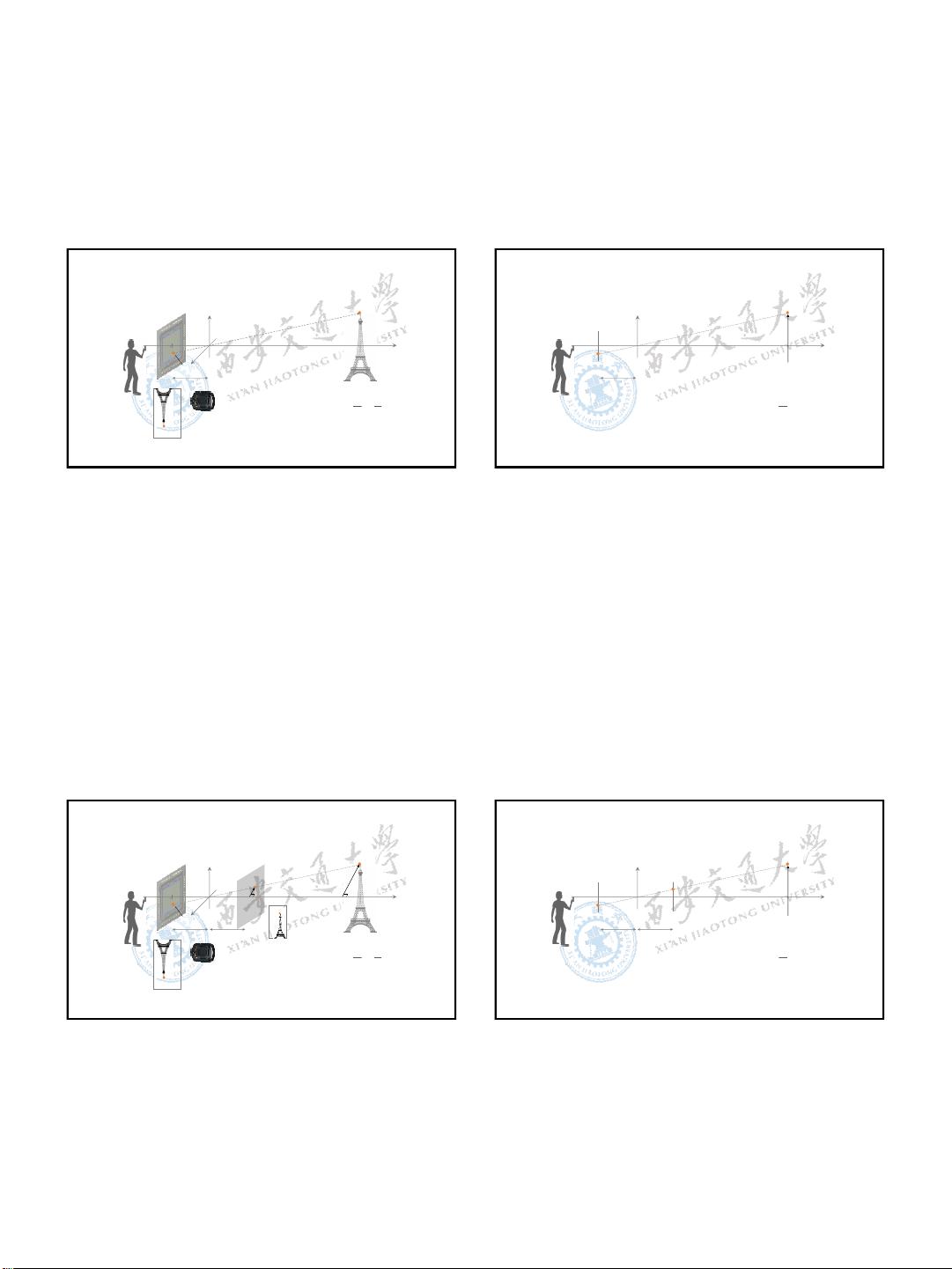
镜头的配置(内部参数)
传感器和小孔之间的空
间位置关系
(内部参数)
摄像机的空间配置
(外部参数)
第十一章 摄像机参数
摄像机是计算机视觉系统的眼睛。
一、内参
二、外参
三、畸变
四、摄像机标定
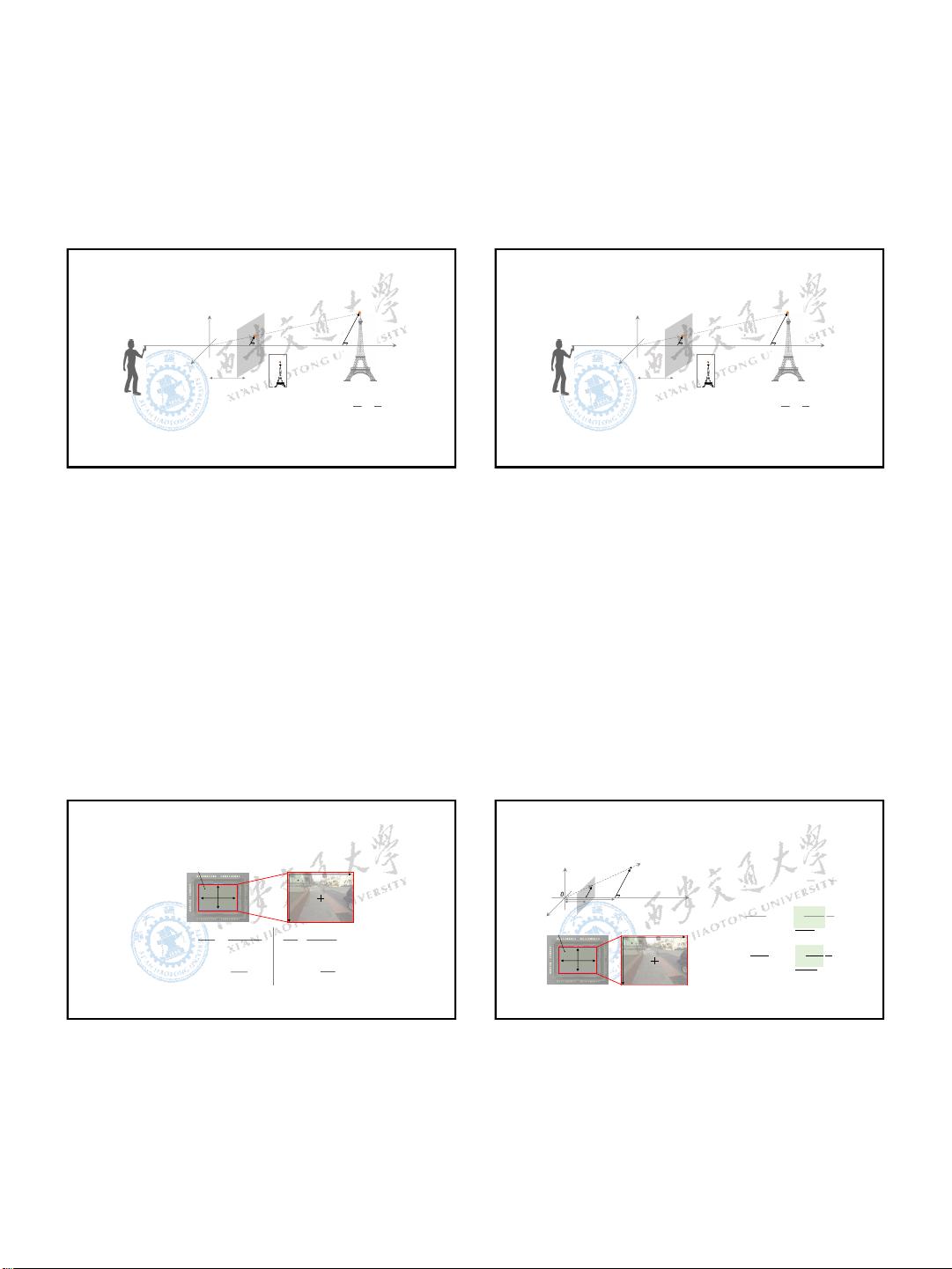
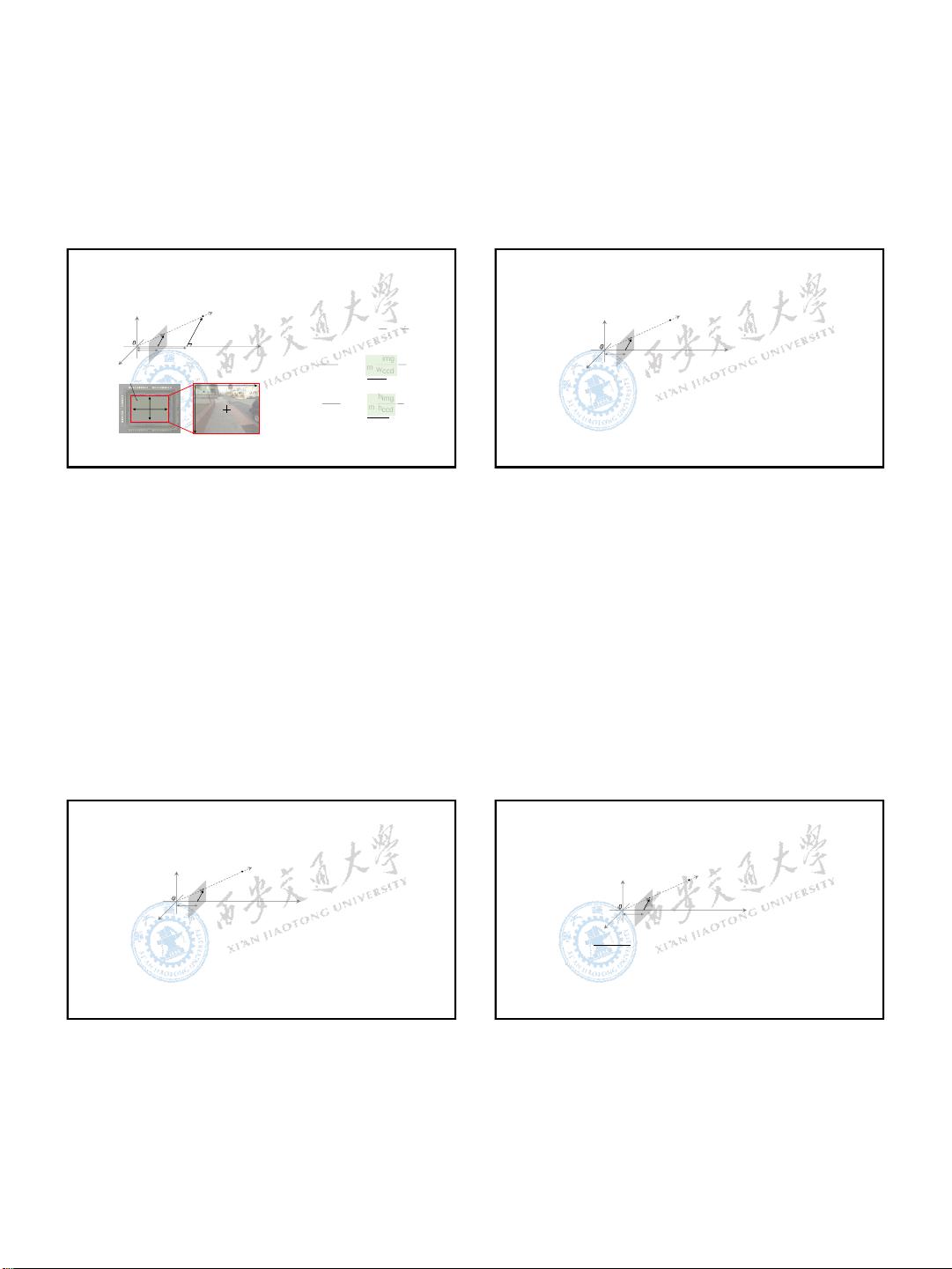
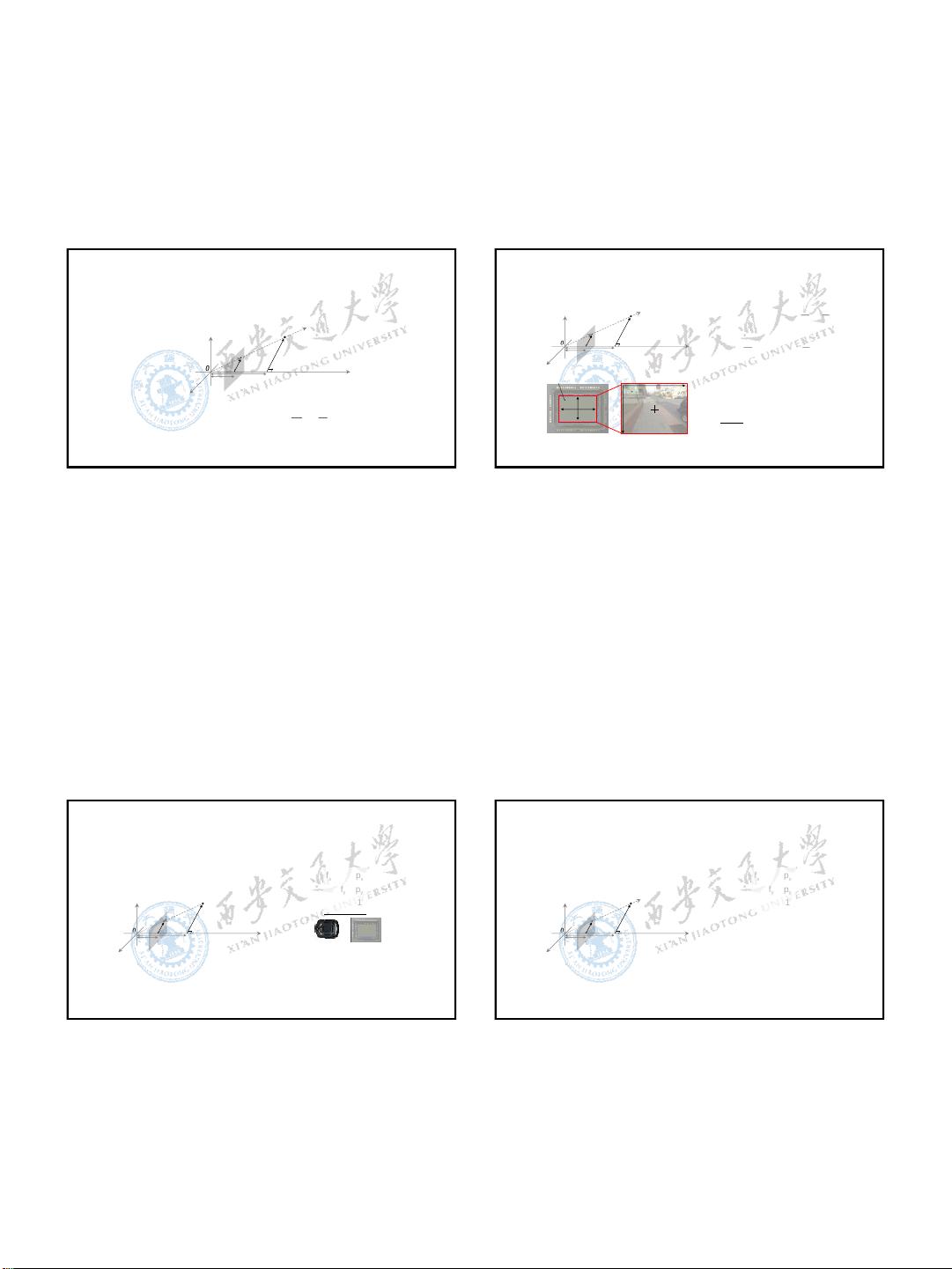
摄像机内参矩阵K
三维物体
镜头
CCD传感器
像素
剩余31页未读,继续阅读













评论0