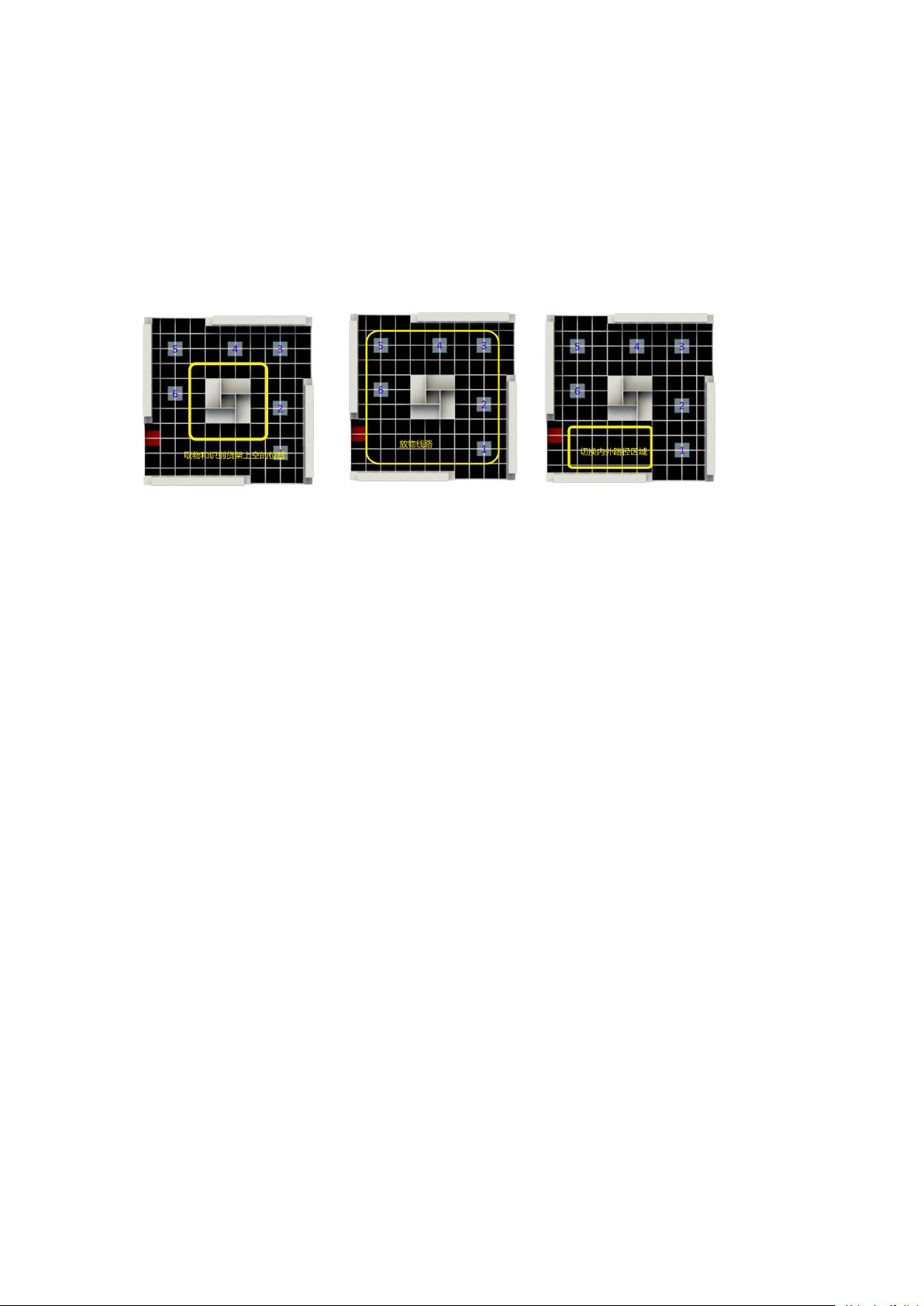
先进入内圈识别补货区的物体,并取下三个一号货架上所需的货物。一圈之后进入外圈
对一号货架进行补货和识别。随后再进入内圈取货,进入外圈补货,循环往复,直到货架都
被放置。
虽然可以通过算法减少所走路程,但随之而来的是大量的转弯和避障,加之此次比赛无
法使用全向轮,又要在逼仄(有障碍物处)转弯,都给小车定位和安全造成风险,走简单路
线并不见得花费更多时间。
抓取物体:抓取物体时利用超声波传感器(可能不好用)配合照相模块来定位抓取。
巡线:红外巡线 4*4(或 3*4)在车的头部,左右侧安装巡线传感器(主)配合车头车
尾的超声波传感器定位(辅/主要在迷路的时候重定位)
可能遇到的问题(目前想到的):
物体倾倒:增强图像识别
物体掉落在地上:一上一下的超声波传感器发现前方障碍物不是物块,则进入附加程序,
拾起障碍物,将其放回补货架上。
迷路:通过超声波,确定自己是否在外圈路径中,若不是,则进入外圈。随后识别货架
上的物体和空货架位置,来判断方位。(因为每个方格和巡迹线是一一对应的)
其他:凉了,重启吧。
二、机械部分
2.1 机械臂
在多次设计后又推翻之后,我们选择购买设计好的 6 自由度机械臂。底部云台可以实现
270 度的旋转,较为灵活。
















评论0