在本文中,我们将深入探讨如何在C++和Python环境中实现ROS(Robot Operating System)中的Subscriber功能,以及如何在Qt界面上进行集成和调试。ROS是机器人软件开发的一个开源框架,它允许不同的组件之间通过发布和订阅消息来通信。在这个“小乌龟案例”中,我们将创建一个Subscriber来接收和处理来自“turtle1/pose”主题的消息。
**1. 添加Subscriber创建**
在ROS中,创建一个Subscriber需要以下步骤:
- 导入必要的ROS库,例如`ros/ros.h`,`geometry_msgs/Pose`等。
- 定义一个回调函数,该函数将在接收到消息时被调用。在这个例子中,回调函数可能命名为`poseCallback`,它接收一个`Pose`类型的参数。
- 使用`ros::NodeHandle`实例创建Subscriber,并将主题名和回调函数传递给它。例如:
```cpp
ros::Subscriber sub = nh.subscribe("/turtle1/pose", 1, &MainWindow::poseCallback, this);
```
在Python中,过程类似,但使用`rospy`库:
```python
import rospy
from geometry_msgs.msg import Pose
def poseCallback(msg):
print(msg)
rospy.init_node('turtle_subscriber', anonymous=True)
sub = rospy.Subscriber('/turtle1/pose', Pose, poseCallback)
```
**2. 添加订阅回调**
回调函数是Subscriber的核心,它处理接收到的数据。在C++中,`poseCallback`函数可能包含如下代码:
```cpp
void MainWindow::poseCallback(const geometry_msgs::Pose::ConstPtr& msg) {
// 处理接收到的Pose数据
}
```
在Python中,回调函数直接在`poseCallback`定义中处理消息:
```python
def poseCallback(msg):
# 处理接收到的Pose数据
print(msg)
```
**3. 调试**
在C++中,你可以使用GDB或其它调试工具来调试代码,检查Subscriber是否正确接收消息。在Qt中,可能需要设置断点并观察程序执行流程。在Python中,由于其解释性,可以使用`print`语句或集成的调试器如pdb进行调试。
**Qt界面集成**
在Qt界面中,我们创建了一个名为`MainWindow`的类,它继承自`QWidget`。这个窗口包含几个输入字段(QLineEdit)用于用户输入线速度和角速度,以及一些QLabel用于显示乌龟的位置、速度和角度。此外,还有一个“发送”按钮(QPushButton),当被点击时,会触发`clickSend`事件。
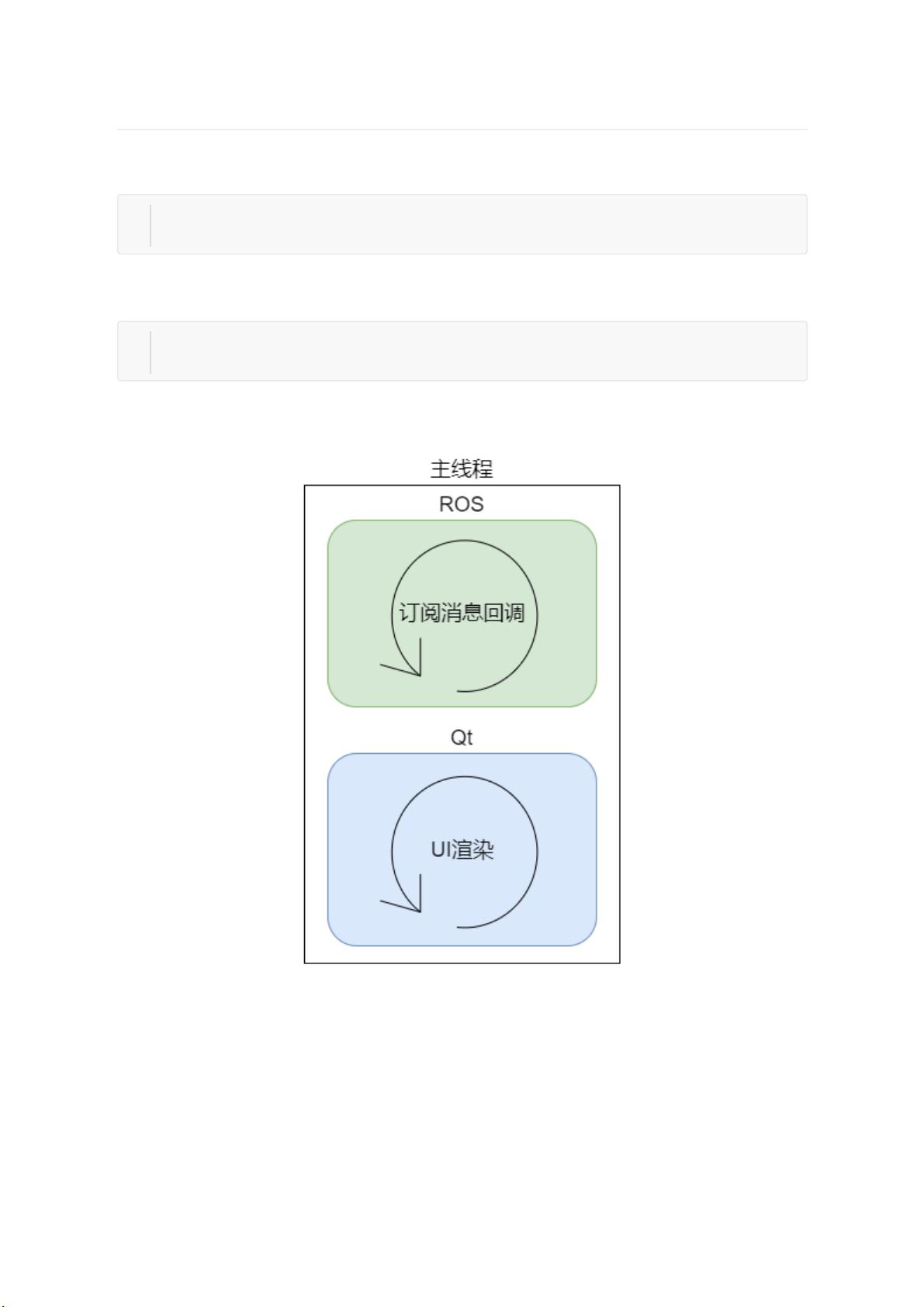
- `updateTimer`是一个定时器,每隔16毫秒触发一次`onUpdate`方法,用于更新UI。
- `onUpdate`方法负责调用`self.update()`来绘制界面,并检查`rospy.is_shutdown()`,如果ROS已关闭,那么关闭Qt窗口。
**完整示例代码**
这里给出了一个简化的`MainWindow`类的Python实现,包括了Subscriber的创建、回调函数和Qt界面的更新逻辑:
```python
import rospy
from PyQt5.QtWidgets import *
from PyQt5.QtCore import *
from PyQt5.QtGui import *
from geometry_msgs.msg import Twist
from turtlesim.msg import Pose
class MainWindow(QWidget):
def __init__(self):
super(MainWindow, self).__init__()
# ... 初始化布局和控件 ...
self.subscriber = rospy.Subscriber("/turtle1/pose", Pose, self.poseCallback)
# ... 创建updateTimer和设置事件 ...
def poseCallback(self, msg):
# ... 处理Pose数据 ...
def onUpdate(self):
# ... 更新UI ...
```
通过以上步骤,我们可以实现一个能够接收并处理ROS消息的Qt界面应用。这个小乌龟案例展示了如何在C++和Python环境中结合使用ROS和Qt,以实现一个交互式的机器人控制系统。在实际项目中,这样的集成可以提供直观的用户界面,方便地监控和控制机器人行为。














评论0