### ROS实验知识点总结
#### 实验内容与结果
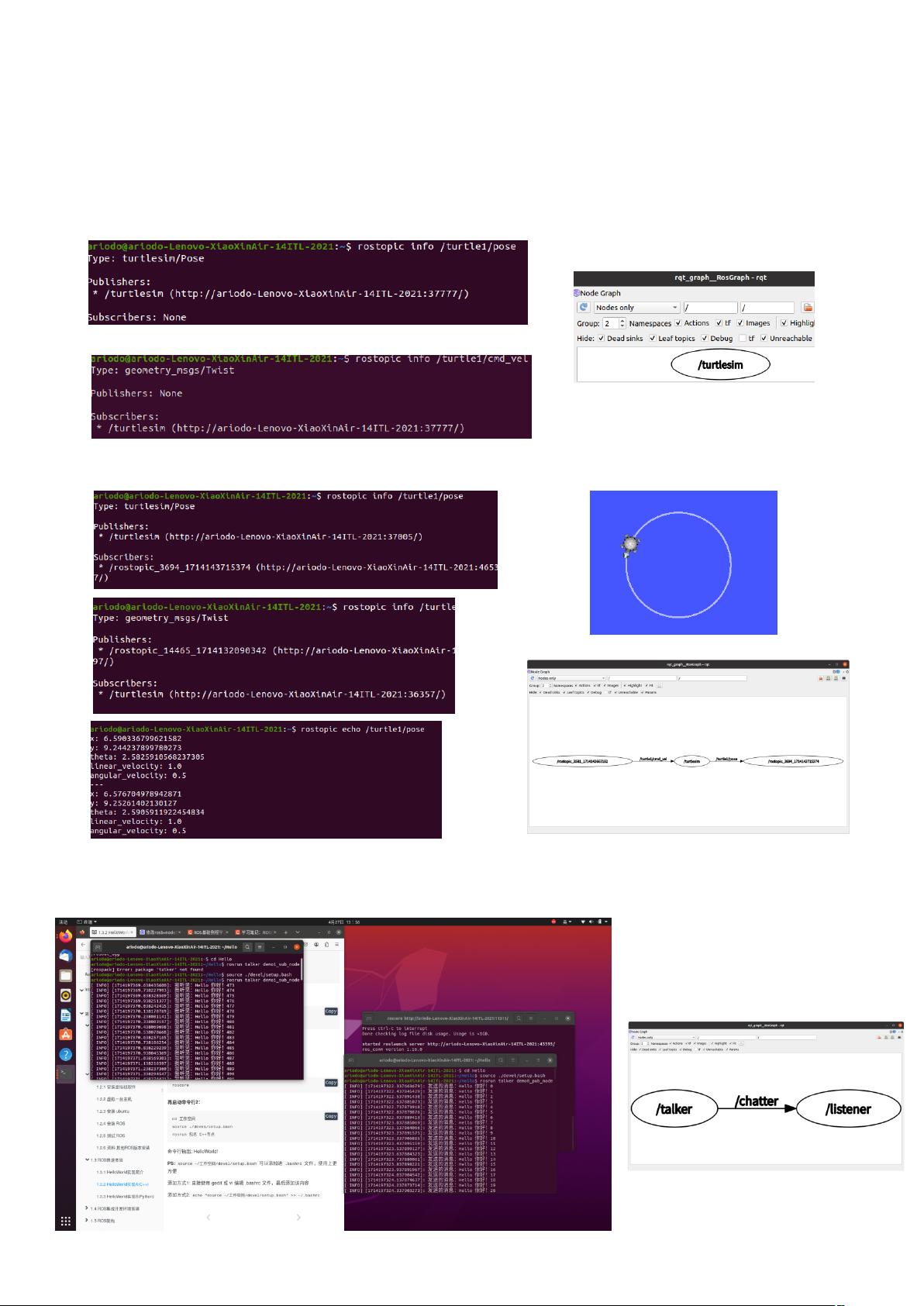
##### 案例一:使用ROS控制小乌龟
**实验背景**:
ROS (Robot Operating System) 是一个开源的元操作系统,用于编写机器人软件。本案例主要介绍了如何使用ROS来控制一个虚拟的小乌龟。
**通信前与通信后**:
- **通信前**:小乌龟处于静止状态。
- **通信后**:通过ROS发布命令,可以控制小乌龟移动,包括前进、后退、转弯等动作。
**实现步骤**:
1. **启动Turtle图形界面**:通过命令`rosrun turtlesim turtlesim_node`启动小乌龟模拟器。
2. **发布消息**:使用`rostopic pub`命令向`/turtle1/cmd_vel`话题发送速度指令。
- 示例命令:`rostopic pub -r 10 /turtle1/cmd_vel geometry_msgs/Twist "linear: {x: 2.0, y: 0.0, z: 0.0} angular: {x: 0.0, y: 0.0, z: 1.8}"`。
- 此处`-r 10`表示每秒发布10次消息。
3. **观察效果**:小乌龟按照指定的速度移动。
##### 案例二:话题通信
**实现细节**:
- **创建发布者节点**:使用Python或C++编写发布者节点,向特定话题发布消息。
- **创建订阅者节点**:同样使用Python或C++编写订阅者节点,订阅上述话题,并处理接收到的消息。
- **示例**:如果发布者节点向名为`chatter`的话题发送字符串消息,则订阅者节点将监听这个话题,并打印接收到的消息。
**注意事项**:
- 确保发布者和订阅者节点使用的topic名称一致。
- 发布者节点和订阅者节点必须在同一个ROS环境中运行。
##### 案例三:仿真小车
**目标**:设计并实现一个简单的仿真小车系统。
**实现步骤**:
1. **构建小车模型**:在ROS环境中创建小车的物理模型。
2. **编写控制器节点**:编写一个节点,用于控制小车的动作,如前进、后退、转向等。
3. **设置传感器**:为小车添加虚拟传感器,如激光雷达、摄像头等,以便进行环境感知。
4. **仿真测试**:在Gazebo等仿真环境中运行整个系统,观察小车的行为。
**扩展实践**:可以通过自定义消息格式来传递更复杂的数据类型,例如使用`sensor_msgs/Image`来传输图像数据。
##### launch文件实践
**目的**:编写一个launch文件,使得多个节点能够一起启动。
**示例**:
1. **创建launch文件**:使用XML格式定义launch文件。
2. **添加节点**:在launch文件中添加需要启动的节点信息。
3. **启动launch文件**:使用`roslaunch`命令启动launch文件。
**示例代码**:
```xml
<launch>
<node pkg="turtlesim" type="turtlesim_node" name="sim" />
<node pkg="beginner_tutorials" type="talker.py" name="talker" />
<node pkg="beginner_tutorials" type="listener.py" name="listener" />
</launch>
```
以上launch文件启动了小乌龟模拟器,并同时启动了发布者节点和订阅者节点。
#### 遇到的问题及解决方案
**安装ROS时的问题**:
- **解决方案**:更换为国内源,可以有效解决下载速度慢的问题。
**控制小乌龟时的问题**:
- **问题描述**:不会使用`tab`键自动补全命令。
- **解决方案**:学习使用`tab`键来自动补全命令,提高效率。
- **问题描述**:消息发布成功但无法订阅。
- **解决方案**:确保在不同的终端窗口中运行发布者和订阅者节点,避免在同一窗口内暂停发布过程导致的问题。
**自定义msg时的问题**:
- **问题描述**:CMakeLists.txt文件中的修改错误。
- **解决方案**:仔细检查错误提示,并对照原始代码进行修正。
#### 对课程内容的建议
- **改进点**:希望教师能够在课程开始时明确提供参考教材链接,并突出强调其重要性。
- **实践经验**:通过实际操作,学生能够更好地理解和掌握ROS的基本使用方法,因此建议增加更多的实践环节。
通过本次实验,不仅加深了对ROS基础功能的理解,还锻炼了解决实际问题的能力。