
第
!!
卷 第
"
期
!##$
年
%
月
飞 行 力 学
&’()*+ ,-./0(12
345
6!!
.4
6"
278
9999999999999999999999999999999999999999999999999999999999999999999
6!##$
收稿日期
:!##";#<;"#=
修订日期
:!##$;#>;?%
作者简介
:
赵亚斌
@?%<%;AB
女
B
山东菏泽人
B
硕士研究生
B
研究方向为计算机控制与仿真
C
文章编号
:?##!;#D>"@!##$A#";##<E;#$
多模型方法在飞控系统故障
重 构 控 制 中 的 应 用
赵亚斌
B
高金源
@
北京航空航天大学 自动控制系
B
北京
?###D"A
摘 要
:
基于多模态控制方法
B
将多模型选择模态的方法用于飞机发生故障时的重构控制
:
设计多个不同状
态的模型及其控制器
B
模型采用固定模型和自适应模型
B
相应控制器按模型匹配方法设计
B
理想模型依飞行品质
要求设计
B
依据转换标准判断当前飞机状态与哪一个模型最接近并转换到相应控制器上
C
自适应模型及其控制器
是采用基于梯度的参数调节方法设计和实现的
C
最后以某机为例进行了仿真验证
B
结果表明该方法是有效的
C
关 键 词
:
多模态
=
多模型转换
=
自适应控制
中图分类号
:
3
!$%F?
文献标识码
:
/
引言
在控制领域
B
由于被控对象在不同的运行条件
和环境下具有不同的特性和要求
B
因此也相应要求
不同的控制器
C
为了满足不同模态采用不同控制器
的要求
B
提出了多模态控制技术
C
多模态控制技术在
飞行控制领域有着重要的作用
C
使用多模态控制
B
通
过及时检测内外部环境变化来选择最优的控制器
B
提高了轨迹跟踪精度
G
效率和生存能力
B
且有更好的
稳定性
C
飞机正常飞行时是一种模态
B
当发生故障时进
入另一种模态
B
需要重构控制器
C
因此
B
可以将多模
态控制方法用于故障重构控制
C
多模型方法是近年
来提出的多模态控制的一种方法
B
本文采用该方法
实现飞机舵面失效故障时的重构
B
研究多模型控制
器的设计和转换
C
?
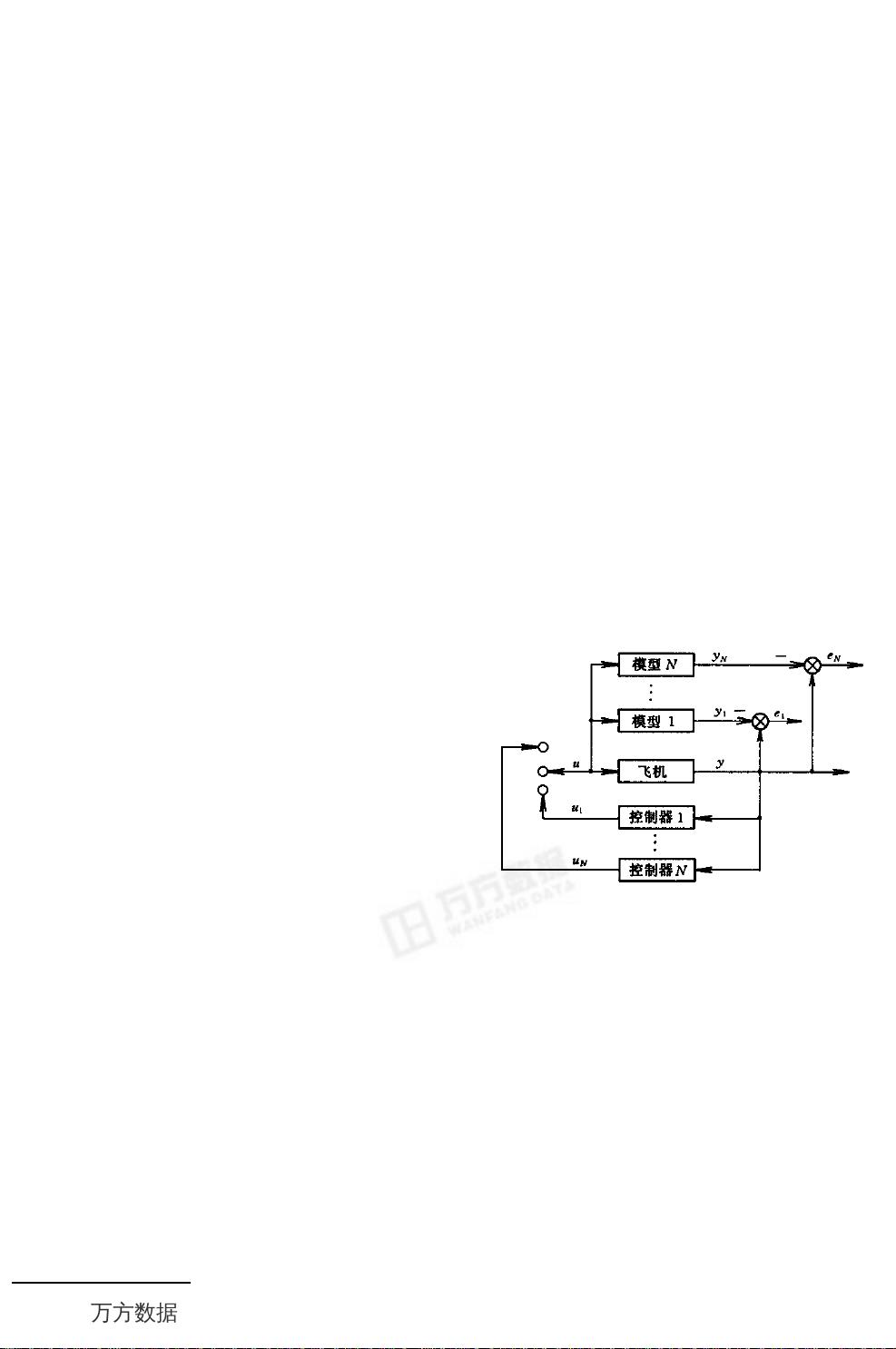
实现多模态控制的多模型方法原理
多模态控制的多模型方法的关键是
:
当飞机内
部及外部状态变化时
B
飞机控制系统采用模态识别
方法识别应采用的模型及控制器并进行转换
C
系统
的基本结构如图
?
H?I
所示
C
图
?
多模型方法的体系结构
图中
B
J
个模型分别代表被控飞机的
J
个不同
的飞行状态
B
并有
J
个对应的控制器以满足飞机在
不同状态下的飞行要求
C
它的基本思想是建立一些
辨识模型
@
观测器
A
和相应的控制器
B
并设计一个在
控制器间进行转换的策略来达到期望的控制目标
C
当飞机用其中某个控制器控制时
B
辨识模型同时也
在并行产生相应的辨识误差
B
并找到一个在某种意
义上最接近飞机当前运行状态的模型
C
一旦这个模
型被找到
B
转换机制就转换
@
或保留
A
到相应的控制
器
B
以保证全局稳定和具有要求的性能
H?I
C
在应用这种方法进行模态识别和转换控制时
B
应注意解决两个问题
B
一是如何选择设计模型及其
万方数据













评论0