第4周课件-全网最详细的ORB-SLAM2精讲1
需积分: 0 40 浏览量
2022-08-04
16:53:18
上传
评论
收藏 3.92MB PDF 举报


第4周:ORB_SLAM2 课程课件
本周课程重点:
1. 地图点相关
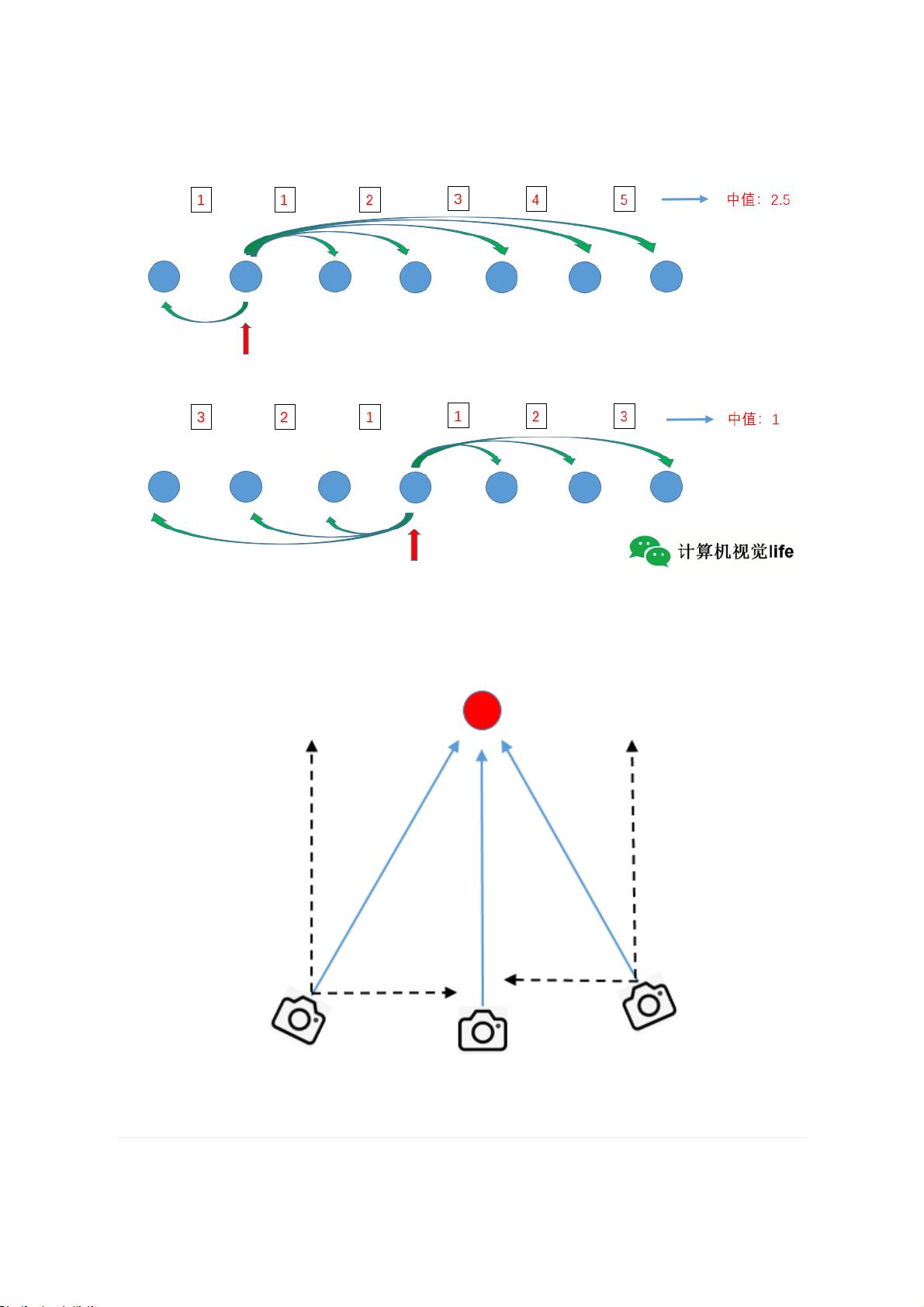
1.1 代表性描述子的计算
1.2 地图点法线朝向的计算
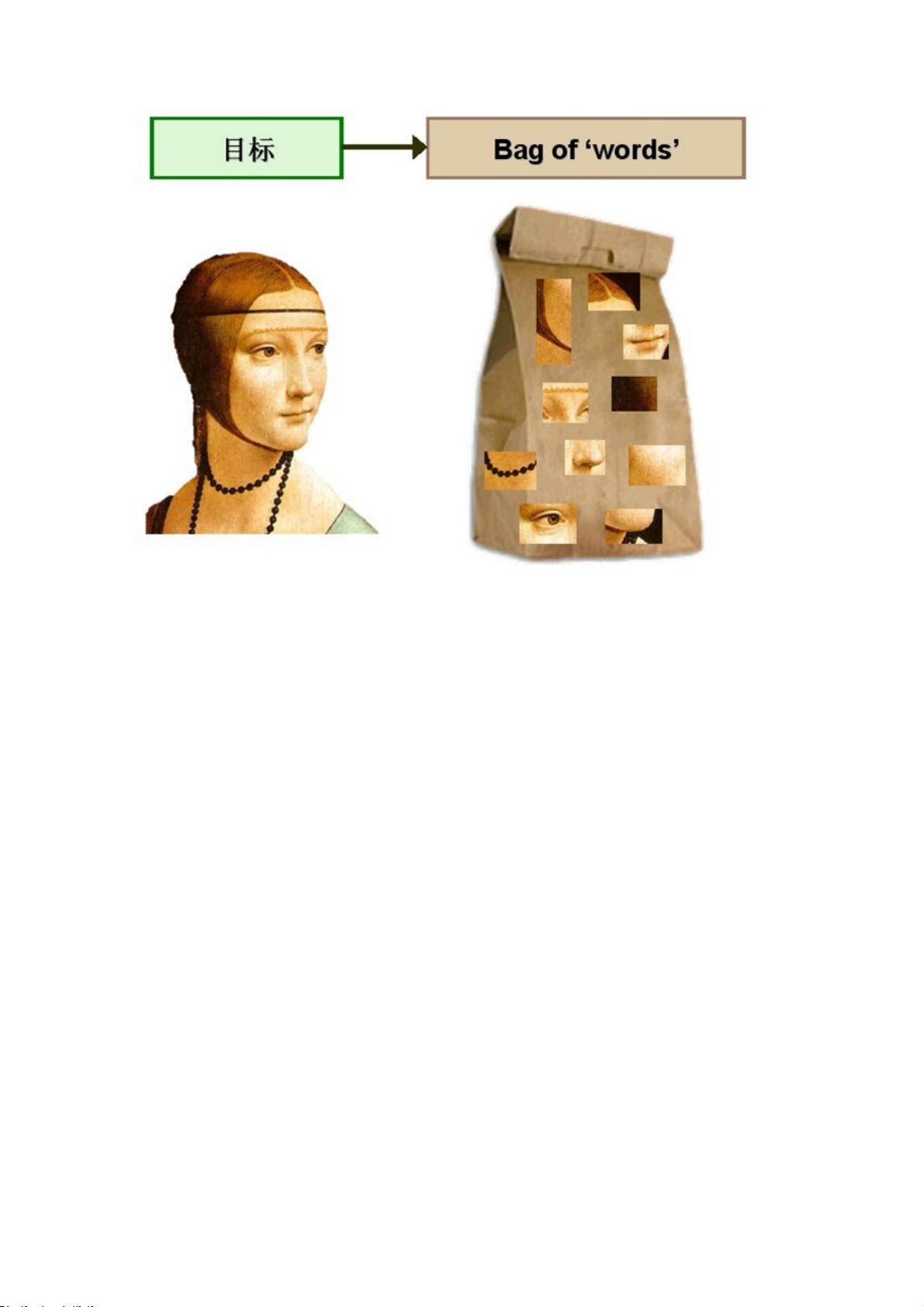
2. 视觉词袋 Bag of Words
2.1 直观理解词袋
2.2 为什么要研究BoW?
类帧差方法
词袋法
2.3 如何制作、生成BoW?
为什么 BOW一般用 BRIEF描述子?
离线训练 vocabulary tree(也称为字典)
在线图像生成BoW向量
什么是节点(node)?
源码解析
BowVector
FeatureVector
2.4 vocabulary tree 的保存和加载
如何保存训练好的 vocabulary tree 存储为txt文件?
如何加载训练好的 vocabulary tree txt文件?
3. 用参考关键帧来跟踪
4 关于g2o和图优化
第4周:ORB_SLAM2 课程课件
本课件是公众号 计算机视觉life 旗下课程《全网最详细的ORB-SLAM2精讲:原理推导+逐行代码分析》
(点击可跳转课程详情)的课程课件。谢谢各位学员的支持!
本课程对应的注释代码:https://github.com/electech6/ORBSLAM2_detailed_comments
由于源码注释和课件在持续更新,所以:
如视频课程中注释与上述GitHub中有不同,以GitHub上最新源码为准。
如视频课程中课件与本课件不同,以本课件为准。
本周课程重点:
1. 理解地图点里成员变量的物理意义。
2. 掌握BOW的原理及应用(重要)。
3. 掌握关键帧跟踪原理(重要)。
4. 理解图优化原理,理解g2o的使用方法(重要)。
1. 地图点相关

剩余18页未读,继续阅读
资源评论













