2. SIFT特征点提取 - PineTree的博客 - CSDN博客1
需积分: 0 75 浏览量
2022-08-04
00:41:58
上传
评论
收藏 3.23MB PDF 举报


计算机视觉中的特征点提取算法比较多,但SIFT除了计算比较耗时以外,其他方面
的优点让其成为特征点提取算法中的一颗璀璨的明珠。SIFT算法的介绍网上有很多比较好的
博客和文章,我在学习这个算法的过程中也参看网上好些资料,即使评价比较高的文章,作
者在文章中对有些比较重要的细节、公式来历没有提及,可能写博客的人自己明白,也觉得
简单,因此就忽略了这些问题,但是对刚入门的人来说,看这些东西,想搞清楚这些是怎么
来的还是比较费时费力的。比如SIFT算法中一个重要的操作:求取描述子的主方向。好多文
章只是一提而过或忽略,然后直接给出一个公式,SIFT算法的原作者也提使用抛物线插值,
但是具体怎么插的就不太详尽了,对于初学者来说更是不知所云。因此本文打算在参看的文
章上对有关这些细节给出一些比较详细的说明,还有本文尽量对操作过程配备对应图片或示
意图说明,同时附上robwhesss开源SIFT C代码对应程序块并给予注解,方便理解。
一
、
SIFT
算
法
1
、
算
法
简
介
尺度不变特征转换即SIFT (Scale-invariantfeaturetransform)是一种计算机视觉的算
法。它用来侦测与描述影像中的局部性特征,它在空间尺度中寻找极值点,并提取出其位
置、尺度、旋转不变量,此算法由DavidLowe在1999年所发表,2004年完善总结。
其应用范围包含物体辨识、机器人地图感知与导航、影像缝合、3D模型建立、手势辨识、影
像追踪和动作比对。
局部影像特征的描述与侦测可以帮助辨识物体,SIFT特征是基于物体上的一些局部外观的兴
趣点而与影像的大小和旋转无关。
对
于
光
线
、
噪
声
、
些
微
视角
改
变
的
容
忍
度
也
相
当
高
。基于
这些特性,它们是高度显著而且相对容易撷取,在母数庞大的特征数据库中,很容易辨识物
体而且鲜有误认。使用SIFT特征描述对于部分物体遮蔽的侦测率也相当高,甚至只需要3个
以上的SIFT物体特征就足以计算出位置与方位。在现今的电脑硬件速度下和小型的特征数据
库条件下,辨识速度可接近即时运算。SIFT特征的信息量大,适合在海量数据库中快速准确
匹配。
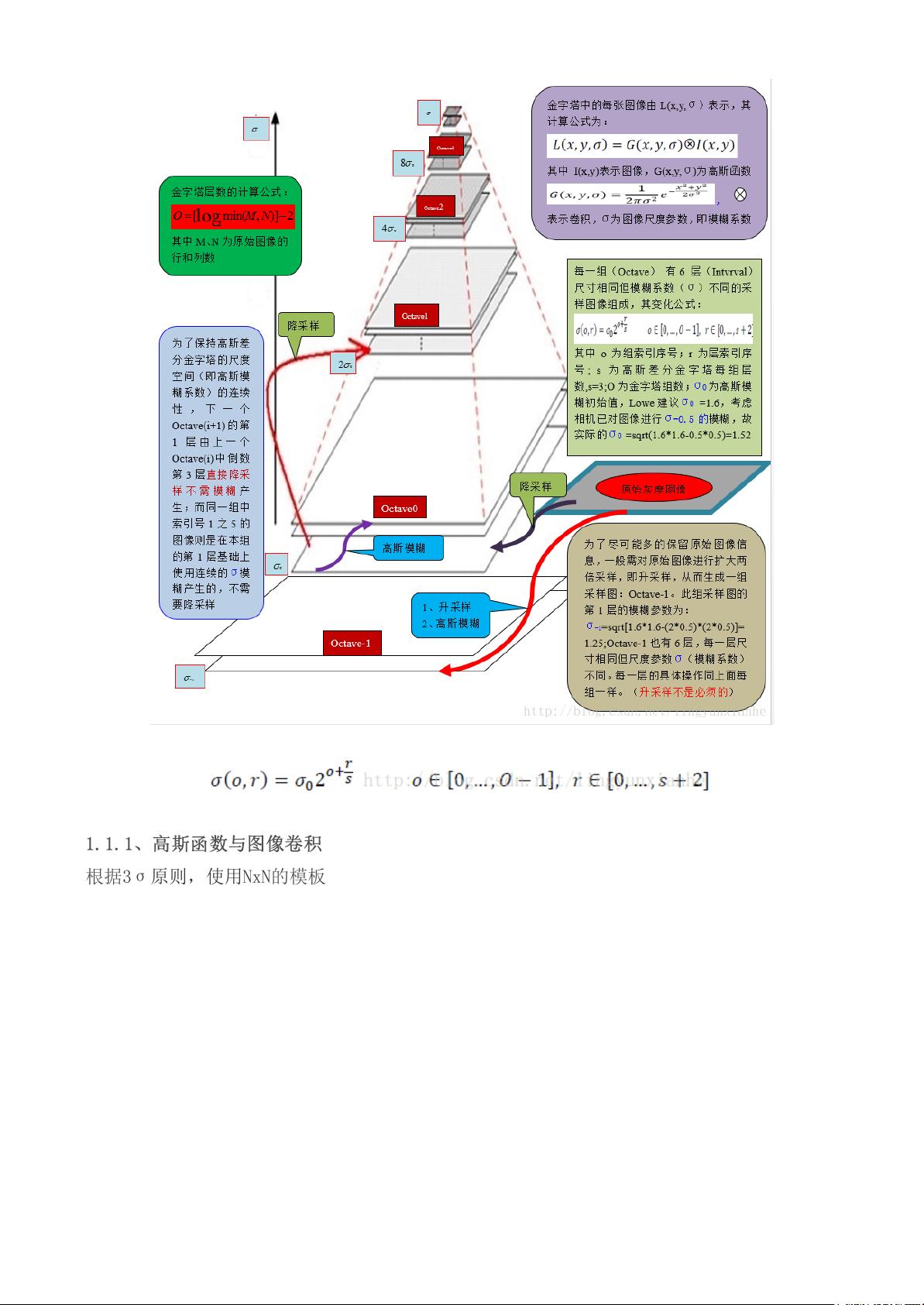
SIFT算法的实质是在不同的尺度空间上查找关键点(特征点),并计算出关键点的方向。SIFT
所查找到的关键点是一些十分突出,不会因光照,仿射变换和噪音等因素而变化的点,如角
点、边缘点、暗区的亮点及亮区的暗点等。
2
、
SIFT
算
法流
程
图

剩余19页未读,继续阅读













评论0