PoolingNd层(Pooling层)1

需积分: 0 53 浏览量
更新于2022-08-03
收藏 460KB PDF 举报
在TensorRT中,PoolingNd层(也称为Pooling层)是一种用于神经网络的降采样操作,主要用于减少输入特征图的维度,同时保持其主要特征。它通常用于卷积神经网络(CNNs)中,以降低计算复杂度并提高模型的泛化能力。在TensorRT 8之前的版本中,我们可以使用`add_pooling_nd`或`add_pooling`方法来添加这个层。然而,从TensorRT 9开始,这些方法已被废弃,推荐使用`add_pooling_nd`。
**参数详解:**
1. **type**: 这个参数定义了池化类型,可以是最大池化(`trt.PoolingType.MAX`)或平均池化(`trt.PoolingType.AVERAGE`)。最大池化选取每个窗口内的最大值,而平均池化则计算窗口内所有元素的平均值。
2. **window_size_nd (window_size)**: 定义了池化窗口的大小,可以是一个N维的元组。例如,对于二维池化,窗口大小可能为`(2, 2)`,表示在宽度和高度方向上进行2x2的池化。
3. **stride_nd (stride)**: 表示滑动窗口在每个维度上的步长。步长决定了池化窗口在特征图上移动的距离。步长通常等于窗口大小,但也可以根据需求设置为其他值。
4. **padding_nd (padding)**: 用于指定填充的维度。填充可以在输入特征图的边缘添加额外的零,以便保持输出尺寸与输入尺寸相同。有三种填充模式:`same`、`valid`和`explicit`。在TensorRT中,这些模式可以通过`pre_padding`和`post_padding`来手动设置。
5. **average_count_excludes_padding**: 如果在平均池化中设置为True,那么计算平均值时将忽略填充区域。如果设置为False,那么包括填充区域。
**示例代码解析:**
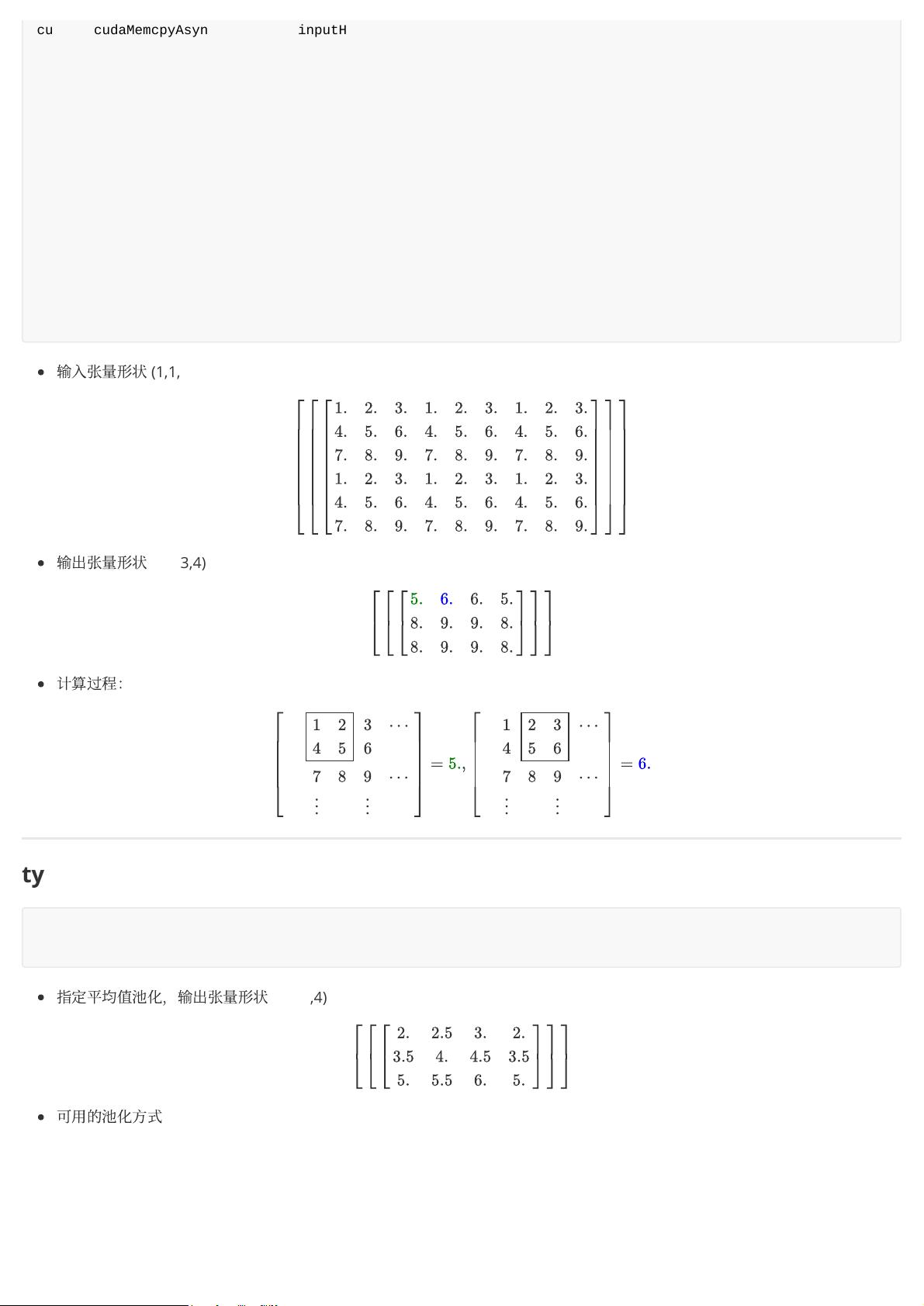
在提供的示例代码中,创建了一个三维池化层,输入张量的形状为 `(1, 1, 6, 9)`,即1个样本,1个通道,高度6和宽度9。池化窗口大小为 `(2, 2)`,没有指定步长,因此默认为 `(2, 2)`。由于未设置padding,所以没有填充。使用的是最大池化(`trt.PoolingType.MAX`)。
代码首先定义了输入张量的数据,并创建了TensorRT构建器、网络和配置。接着,通过`add_pooling_nd`方法添加了Pool Layer,并将其标记为网络的输出。然后,构建并序列化网络,创建CUDA引擎,最后分配设备内存,执行计算并将结果从设备拷贝回主机。
在计算过程中,注意到输入张量的形状从 `(1, 1, 6, 9)` 变为了 `(1, 1, 3, 4)`,这是因为池化窗口覆盖了原始特征图的一部分,导致输出的维度减小。由于没有使用填充,所以输出的形状是基于输入形状和池化窗口大小计算得出的。
PoolingNd层在TensorRT中用于执行多维池化操作,它提供了灵活性,允许用户自定义池化窗口大小、步长和填充,以适应不同的神经网络架构。在更新到TensorRT 9及以上版本时,需要将旧的API替换为`add_pooling_nd`,以保持兼容性和最佳性能。

PoolingNd
层
(
Pooling
层
)
参
数
及
⽰
例
(
括
号
中
的
层
名
和
参
数
名
适
⽤
于
TensorRT8
及
之
前
版
本
,
TensorRT9
及
之
后
被
废
弃
)
初
始
⽰
例
代
码
type
blend_factor
window_size_nd (window_size)
stride_nd (stride)
padding_nd (padding)
pre_padding
post_padding
padding_mode
average_count_excludes_padding
三
维
池
化
的
⽰
例
使
⽤
旧
版
API add_pooling
会
收
到
警
告
:
初
始
⽰
例
代
码
DeprecationWarning: Use add_pooling_nd instead.
import numpy as np
from cuda import cudart
import tensorrt as trt
nIn, cIn, hIn, wIn = 1, 1, 6, 9 #
输
⼊
张
量
NCHW
hW, wW = 2, 2 #
池
化
窗
口
HW
data = np.tile(np.arange(1, 1 + 9, dtype=np.float32).reshape(1, 3, 3), (nIn, cIn, hIn // 3, wIn // 3))
#
输
⼊
数
据
np.set_printoptions(precision=8, linewidth=200, suppress=True)
cudart.cudaDeviceSynchronize()
logger = trt.Logger(trt.Logger.ERROR)
builder = trt.Builder(logger)
network = builder.create_network(1 << int(trt.NetworkDefinitionCreationFlag.EXPLICIT_BATCH))
config = builder.create_builder_config()
inputT0 = network.add_input('inputT0', trt.DataType.FLOAT, (nIn, cIn, hIn, wIn))
#---------------------------------------------------------- --------------------#
替
换
部
分
poolLayer = network.add_pooling_nd(inputT0, trt.PoolingType.MAX, (hW, wW))
#---------------------------------------------------------- --------------------#
替
换
部
分
network.mark_output(poolLayer.get_output(0))
engineString = builder.build_serialized_network(network, config)
engine = trt.Runtime(logger).deserialize_cuda_engine(engineString)
context = engine.create_execution_context()
_, stream = cudart.cudaStreamCreate()
inputH0 = np.ascontiguousarray(data.reshape(-1))
outputH0 = np.empty(context.get_binding_shape(1), dtype=trt.nptype(engine.get_binding_dtype(1)))
_, inputD0 = cudart.cudaMallocAsync(inputH0.nbytes, stream)
_, outputD0 = cudart.cudaMallocAsync(outputH0.nbytes, stream)
剩余6页未读,继续阅读
193 浏览量
192 浏览量
189 浏览量
134 浏览量
2022-08-08 上传
147 浏览量
116 浏览量
176 浏览量
2021-08-11 上传
181 浏览量
104 浏览量
2021-04-01 上传
179 浏览量
2022-08-04 上传
112 浏览量
141 浏览量
2020-12-23 上传
2018-04-19 上传
196 浏览量
2014-03-31 上传
118 浏览量
130 浏览量
资源评论


lowsapkj
- 粉丝: 1015
- 资源: 312









最新资源
- 白色简洁风格的个人博客模板下载.rar
- 白色简洁风格的高山雪花登录注册框源码下载.zip
- 白色简洁风格的格调精品餐厅整站网站源码下载.zip
- 白色简洁风格的工业制造整站网站源码下载.zip
- 白色简洁风格的工艺品展览企业网站源码下载.zip
- 白色简洁风格的国际货运企业网站模板.rar
- 白色简洁风格的国外求职网页CSS模板.zip
- 白色简洁风格的果园水果主题整站网站源码下载.zip
- 白色简洁风格的国外设计团队CSS3网站模板下载.zip
- 白色简洁风格的韩国个人网页源码下载.zip
- 白色简洁风格的海上冲浪网页企业网站模板下载.rar
- 白色简洁风格的海边度假旅游HTML模板.zip
- 白色简洁风格的汉堡快餐外卖企业网站模板.zip
- 白色简洁风格的豪华海景酒店整站网站模板.zip
- 白色简洁风格的汉堡薯条快餐企业网站模板.zip
- 白色简洁风格的户外风筝CSS网站模板.zip
