
ISSN 1000-0054
CN 11-2223/ N
清华大学学报 ( 自然科学版)
J T singh ua U n iv ( Sci & Tech ) ,
2001 年 第 41 卷 第 8 期
2001, V ol. 41, N o . 8
23/ 34
87-89
月球探测器软着陆的最优控制
徐 敏, 李俊峰
( 清华大学 工程力学系, 北京 100084)
收稿日期: 2000-07-17
基金项目: 国家“八六三”高技术项目 ( 863-2-8-3-1)
作者简介: 徐 敏( 1975-) , 男( 汉) , 甘肃, 硕士研究生。
摘 要: 为 研究月 球探测 器从月球 泊轨道 向月面 软着陆 的
最优控制问 题, 提出了一 种两次制动变轨的 软着陆方案: 探
月器从月球停泊轨道出发, 启动变轨发动机进行第一次 制动
后飞向月球, 在月面附近第二次制动以实现软着陆。在 两次
制动 变轨时, 对固定推 力发动机的 情况, 采用
P ontr yag in
极
大值原理对燃料最省变轨控制问题进行 了分析, 并引入 遗传
算法 数值求解两 点边值问 题, 得到 了制动变 轨的初 始、终 端
位置和发动机推力方向角的最优控制规 律。
关键词: 月球探测器; 软着陆; 最优控制; 遗传算法
中图分类号:
V
412. 4
文章编号: 1000-0054( 2001) 08-0087-03 文献标识码: A
Optimal control of lunar soft landing
XU Min, LI Junf eng
( Department of Engineering Mechanics, Tsinghua University,
Beij ing 100084, China)
Ab stract: T his paper presen ts an optimal cont rol schem e t hat
contains t w o deceler ation phases f or s oft land ing of a lun ar lander t o
the moon. T he lun ar l and er decelerates f rom a moon parking orbit to
the moon. T hen th e lander is sh ow ed again for sof t landing as it
ar rives at th e moon su rface. Th e minim um fuel orb it coplanar
tran sf ers w ith cons t ant thru st during tw o deceleration ph as es were
studied using t he Pont ryagin maximum prin ciple. Th e opt imal start
an d end positions of t he orbit t ransfer and t he opt imal control
his tory of th e th rust direct ion are ob tained by solving a tw o-p oin t
boundary valu e problem using t he genetic algorit h m.
Key words: lu nar lander; s oft landing ; opt imal cont rol; genetic
algorithm
在月球建立空间基地或对月面勘测时, 需要使
探月器以很小的速度降落到月面, 以保证仪器设备
的安全
[ 1]
。探月轨道分为地球逃逸轨道、地- 月转
移轨道、月球俘获轨道和 月面着陆轨道几个部分。
Pieson B L
等
[ 2]
研究了前三 段轨道的最优控制问
题。月面着陆分为硬着陆和软着陆。硬着陆对探月
器着陆时的速度没有限制, 软着路则要求探月器以
无速度地着陆在月面上。由于月球上没有空气, 不能
通过大气阻力来减速, 必须用探月器上的发动机来
制动。所设计的探月器采用固定推力发动机, 从月球
停泊轨道出发, 通过两次点火制动实现在月面的软
着陆。变轨控制问题是以消耗燃料最少为目标, 采用
Pontr yagin 极大值进行分析
[ 3]
, 得到了最优变轨时
发动机点火和关车的最佳位置, 以及推力方向的最
优控制规律。在数值求解最优控制问题时采用了遗
传算法
[ 4]
, 具有鲁棒性强、易于并行处理、适用于求
解一些复杂的非线性最优化问题等特点。
1 两次制动的软着陆方案
探月器先在月球停泊轨道上飞行, 经过第一次
制动, 从停泊轨道变轨到近地点在月球表面、远地点
在停泊轨道上的椭圆轨道, 接近月面时再进行第二
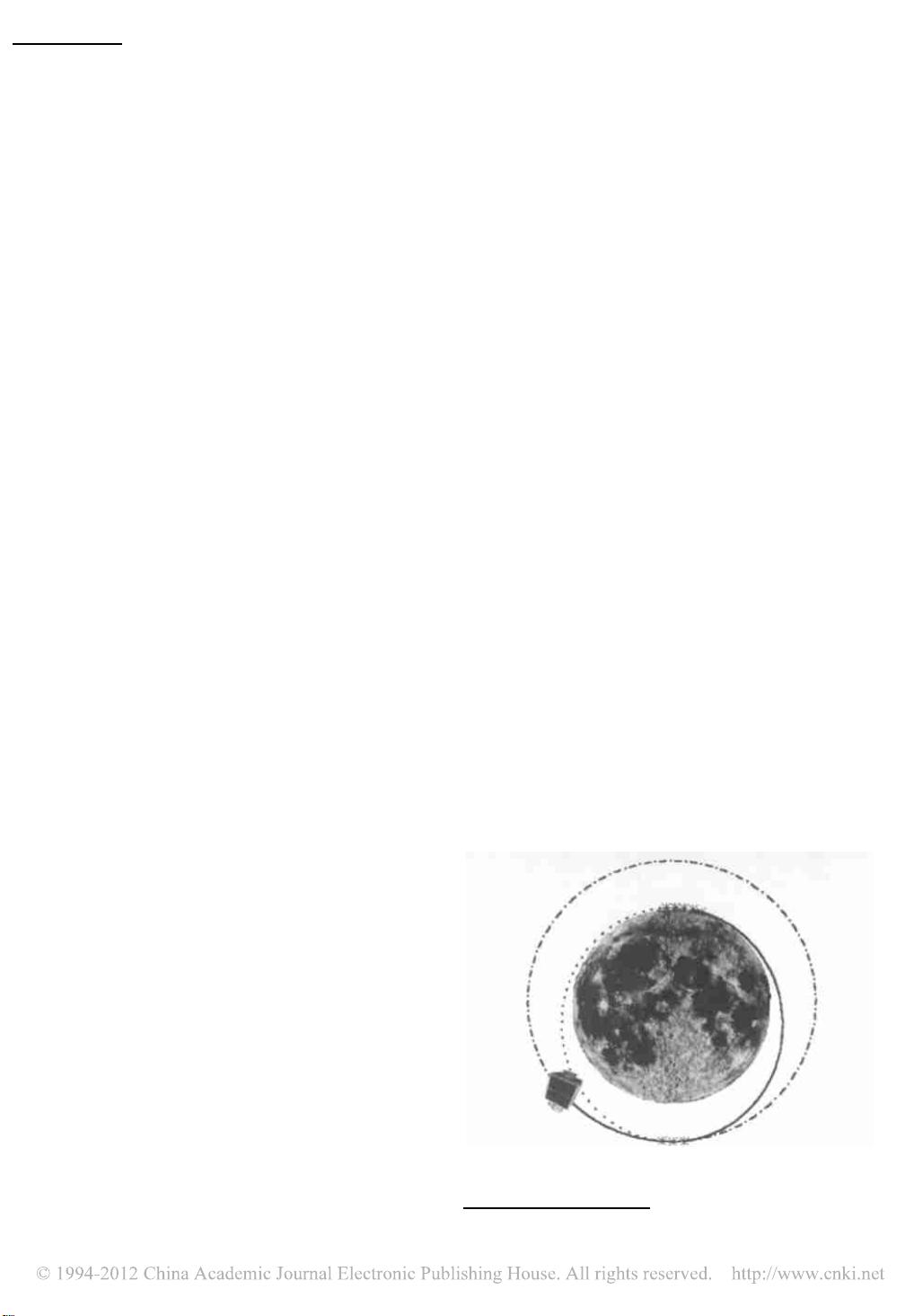
次制动, 以实现软着陆。如图 1 所示, 其中带“* ”的
部分表示制动段。按照此方案, 探月器在从停泊轨道
下降到月面附近的阶段, 利用了月球引力的作用, 发
动机无须点火, 不消耗燃料; 在两次制动减速阶段,
以消耗燃料最少为目标进行最优控制, 按照所得的
图 1 软着陆两次制动示意图
更多数学建模资料请关注微店店铺“数学建模学习交流”
https://k.weidian.com/RHO6PSpA






评论0
最新资源