Learning deep representations by mutual information estimation a
需积分: 0 195 浏览量
2022-08-03
12:55:31
上传
评论
收藏 4.57MB PDF 举报


Published as a conference paper at ICLR 2019
LEARNING DEEP REPRESENTATIONS BY MUTUAL IN-
FORMATION ESTIMATION AND MAXIMIZATION
R Devon Hjelm
MSR Montreal, MILA, UdeM, IVADO
devon.hjelm@microsoft.com
Alex Fedorov
MRN, UNM
Samuel Lavoie-Marchildon
MILA, UdeM
Karan Grewal
U Toronto
Phil Bachman
MSR Montreal
Adam Trischler
MSR Montreal
Yoshua Bengio
MILA, UdeM, IVADO, CIFAR
ABSTRACT
This work investigates unsupervised learning of representations by maximizing
mutual information between an input and the output of a deep neural network en-
coder. Importantly, we show that structure matters: incorporating knowledge about
locality in the input into the objective can significantly improve a representation’s
suitability for downstream tasks. We further control characteristics of the repre-
sentation by matching to a prior distribution adversarially. Our method, which we
call Deep InfoMax (DIM), outperforms a number of popular unsupervised learning
methods and compares favorably with fully-supervised learning on several clas-
sification tasks in with some standard architectures. DIM opens new avenues for
unsupervised learning of representations and is an important step towards flexible
formulations of representation learning objectives for specific end-goals.
1 INTRODUCTION
One core objective of deep learning is to discover useful representations, and the simple idea explored
here is to train a representation-learning function, i.e. an encoder, to maximize the mutual information
(MI) between its inputs and outputs. MI is notoriously difficult to compute, particularly in continuous
and high-dimensional settings. Fortunately, recent advances enable effective computation of MI
between high dimensional input/output pairs of deep neural networks (Belghazi et al., 2018). We
leverage MI estimation for representation learning and show that, depending on the downstream
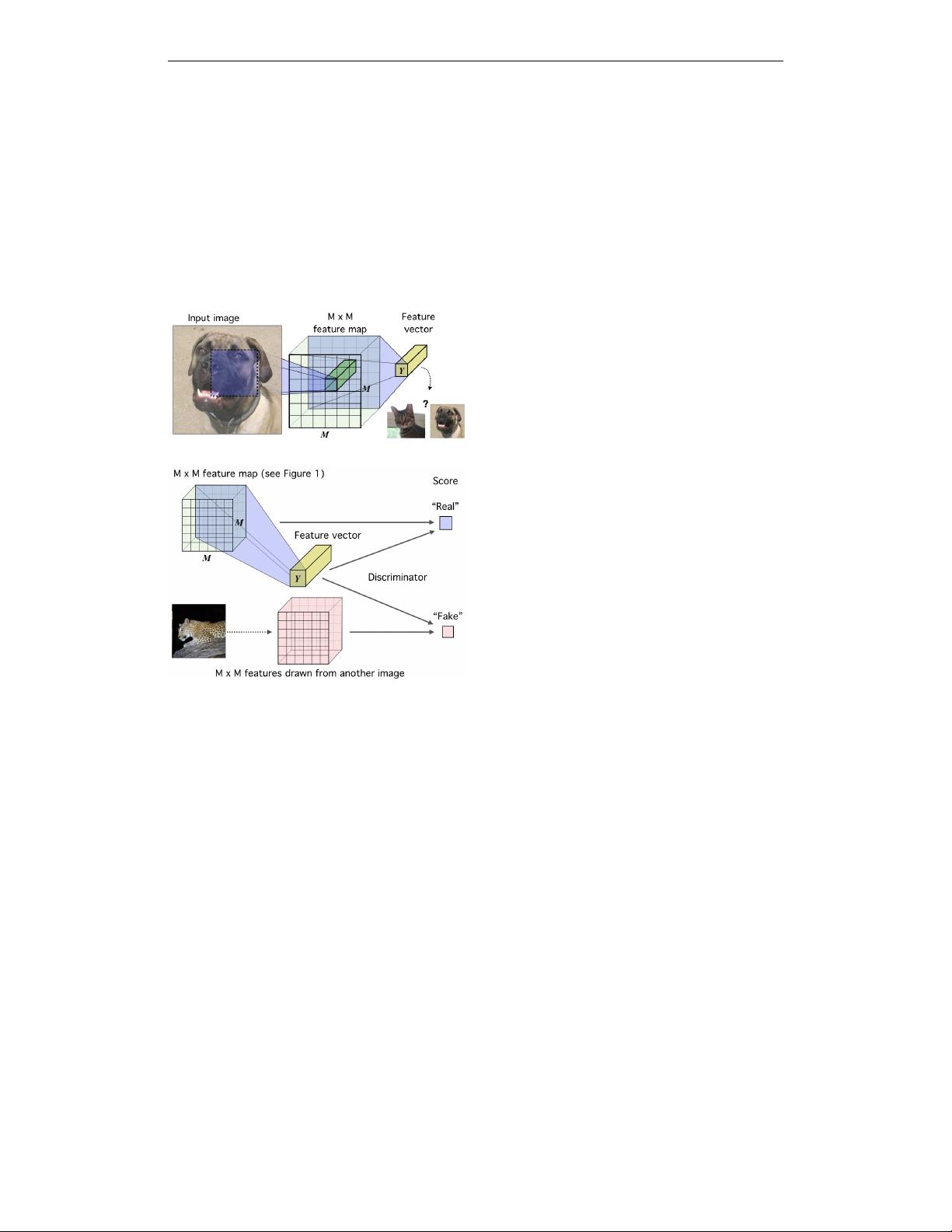
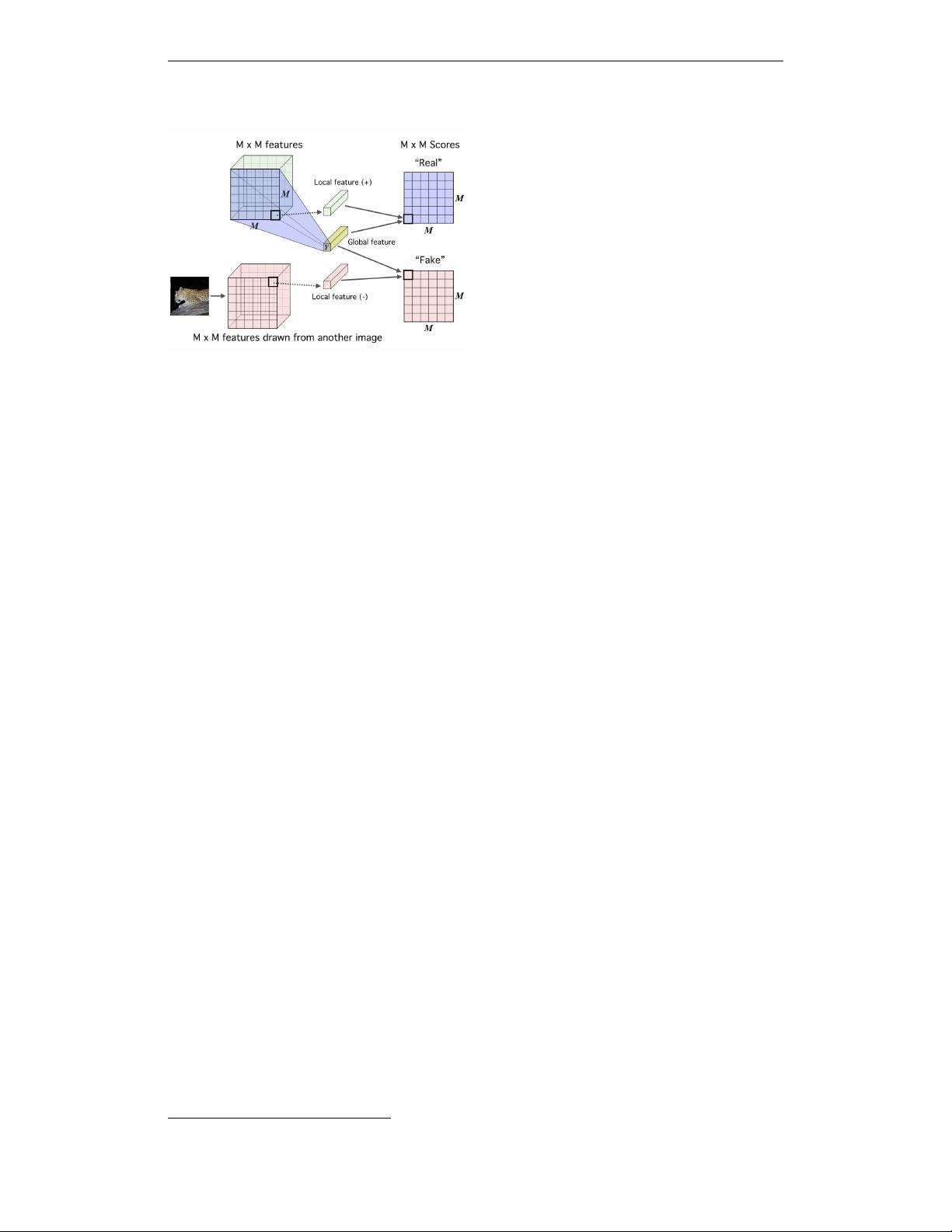
task, maximizing MI between the complete input and the encoder output (i.e., global MI) is often
insufficient for learning useful representations. Rather, structure matters: maximizing the average
MI between the representation and local regions of the input (e.g. patches rather than the complete
image) can greatly improve the representation’s quality for, e.g., classification tasks, while global MI
plays a stronger role in the ability to reconstruct the full input given the representation.
Usefulness of a representation is not just a matter of information content: representational char-
acteristics like independence also play an important role (Gretton et al., 2012; Hyv
¨
arinen & Oja,
2000; Hinton, 2002; Schmidhuber, 1992; Bengio et al., 2013; Thomas et al., 2017). We combine MI
maximization with prior matching in a manner similar to adversarial autoencoders (AAE, Makhzani
et al., 2015) to constrain representations according to desired statistical properties. This approach is
closely related to the infomax optimization principle (Linsker, 1988; Bell & Sejnowski, 1995), so we
call our method Deep InfoMax (DIM). Our main contributions are the following:
•
We formalize Deep InfoMax (DIM), which simultaneously estimates and maximizes the
mutual information between input data and learned high-level representations.
•
Our mutual information maximization procedure can prioritize global or local information,
which we show can be used to tune the suitability of learned representations for classification
or reconstruction-style tasks.
•
We use adversarial learning (
`
a la Makhzani et al., 2015) to constrain the representation to
have desired statistical characteristics specific to a prior.
1


剩余23页未读,继续阅读













评论0