嫦娥三号软着陆轨道设计与控制策略方案设计以及源码数据集.docx
版权申诉
195 浏览量
2024-05-02
18:08:00
上传
评论
收藏 688KB DOCX 举报


1
嫦娥三号软着陆轨道设计与控制策略
摘要
本文研究的是嫦娥三号软着陆轨道设计与最优控制策略问题,根据动力学相关原理,
建立了嫦娥三号软着陆轨迹模型,以燃料消耗量最小为目标,得到软着陆过程中各阶段
的最优控制策略。
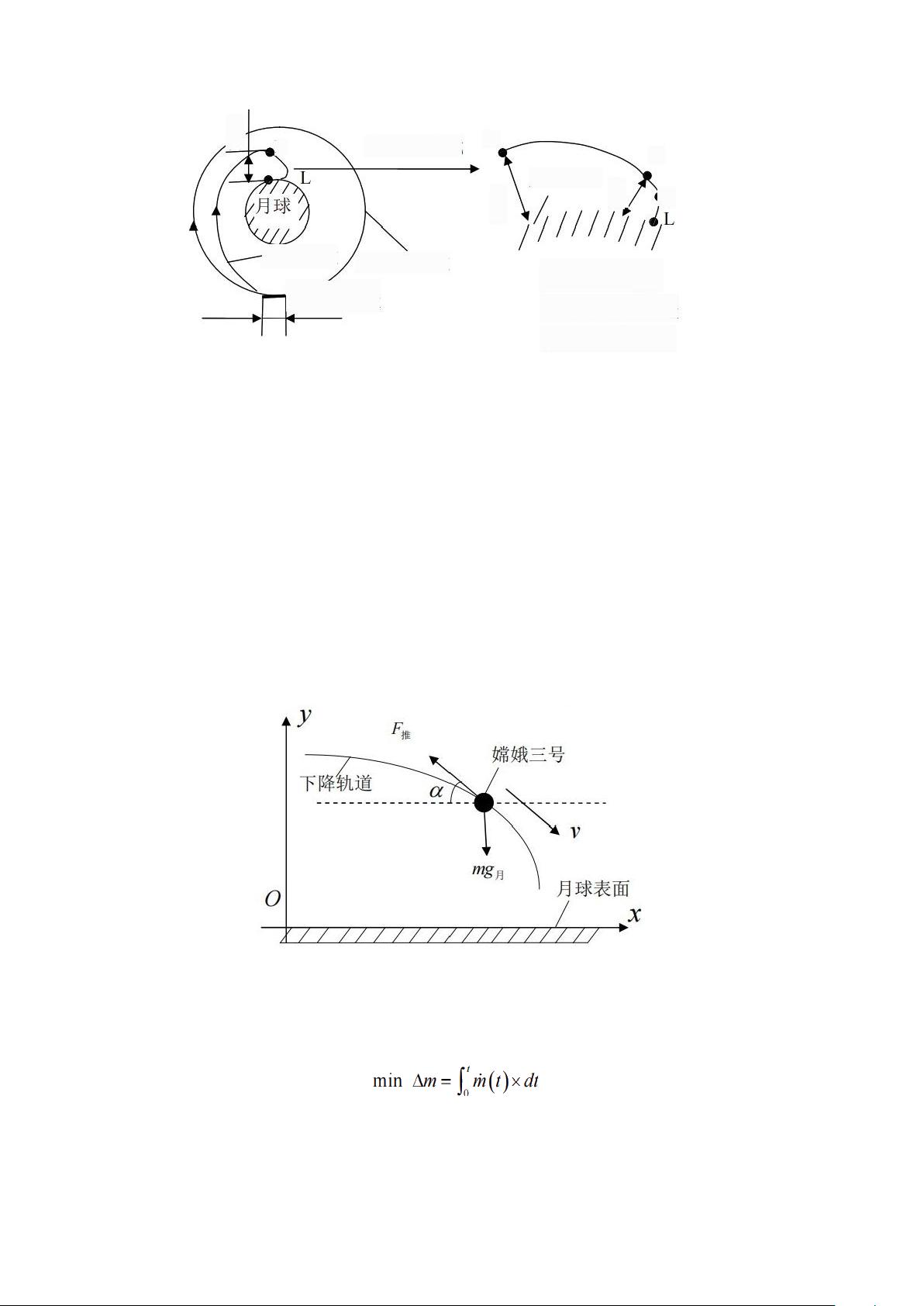
针对问题 1,首先确定通过嫦娥三号着陆准备轨道位于其着陆点所在经线与月心构
成的平面内,然后对嫦娥三号在主减速段进行受力分析,以近月点在月球表面的投影点
为原点,以着陆轨道参考系纵向平面为xoy 面,以初始飞行方向为 x 轴,以原点与近月
点的连线方向为y 轴,建立平面直角坐标系,根据牛顿第二定律,建立嫦娥三号主减速
段轨迹模型,以燃料消耗量最小为目标,通过轨迹离散化,逐步迭代求得该阶段的水平
位移,再依据地理学经纬度计算规则,建立地表距离与经纬度转化模型,最终得到近月
点在月球表面的投影位置为19.51 W, 31.68 N ,距离月球表面高度为15km ,远月点在月球
表面的投影位置为160.49 E, 31.68 S ,距离月球表面高度为100km 。利用机械能守恒定理
和开普勒第二定律 ,最终得到近月点与远月点速度的大小分别为为 1.692km / s ,
1.614km / s 。
针对问题 2,根据牛顿第二定律,以每个阶段初始点和终值点的状态为约束,以燃
料消耗最小为目标,建立全局最优模型,通过轨迹离散化,逐步迭代求得每个阶段的水
平位移,分别得到软着陆过程 6 个阶段着陆轨迹方程及其对应的最优控制策略;在粗避
障段和精避障段,我们将所给数字高程图均分成 9 块,综合相对高程差与标准差定义平
坦度指标来衡量每一块区域,从而选取最佳着陆点;在粗避障段,分别从两种运动状态:
其一是先把主减速发动机关闭,在进行一段时间匀加速直线运动后,再次打开发动机,
进行减速直线运动,其二是整个阶段都进行匀速直线运动,以燃料消耗最小为目标,确
定前者更优从而确定该阶段最优控制策略。
针对问题 3,从改变近月点离月球表面的距离和主减速发动机提供的推力两个方面,
对嫦娥三号在该段的水平位移、燃料消耗等参数进行灵敏度分析,发现近月点离月球表
面的距离与该段的水平位移和燃料消耗呈线性正相关,发现主减速发动机提供的推力与
该段的水平位移呈线性负相关,与该段的燃料消耗呈线性正相关。由于嫦娥三号在主减
速段水平位移最大,选取该段从对近月点离月球表面的距离变化和主减速发动机提供的
推力变化两个角度对模型进行局部阶段误差分析,通过计算每个阶段时间的相对误差对
模型进行整体误差分析。
最后,对模型的优缺点进行评价,并提出改进的方向。
关键词:逐步迭代 最优控制 微分方程模型

剩余36页未读,继续阅读
资源评论


小码蚁.
- 粉丝: 2671
- 资源: 4523

下载权益

C知道特权

VIP文章

课程特权
开通VIP











