人工智能人工智能技术在求机器人工作空间的应用.doc
版权申诉
104 浏览量
2023-07-15
14:37:54
上传
评论
收藏 533KB DOC 举报


摘 要
人工智能的发展迅速,现在已经渗透到机器人的全方位分析与机器人的工作
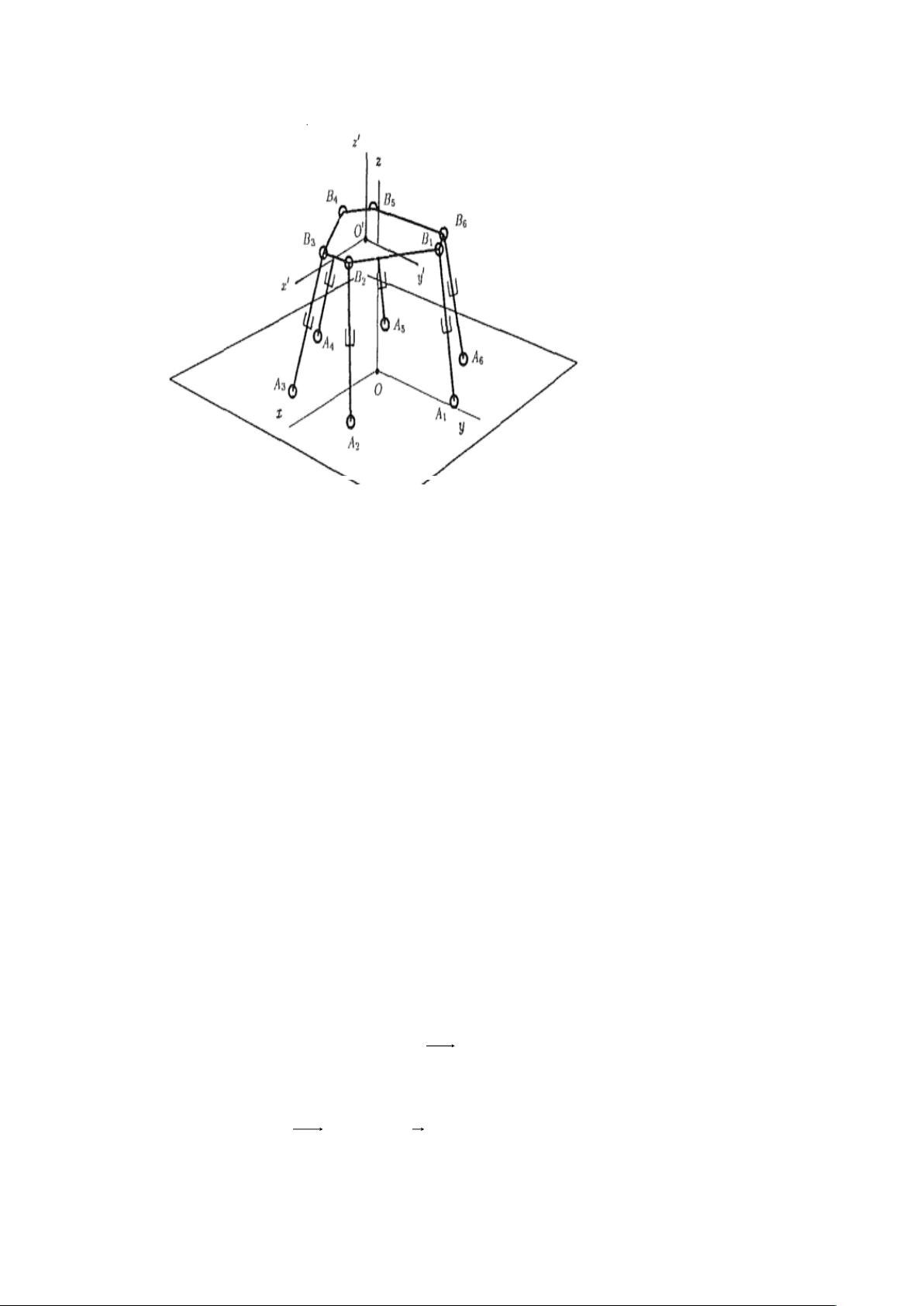
空间的计算中,其对机器人的应用起着越来越重要的作用。元素限制法由三个限
制元素构成,分别为杆长限制、转角限制、连杆的干涉。在初步确定限制元素后
即可得到边界条件,即可得到工作空间。圆弧相交法由运动学反解过程、工作空
间的几何描述以及工作空间的计算过程组成。两者各有其优缺点,都是可取的求
工作空间的方法。
关键词:人工智能 元素限制 圆弧相交 工作空间
Abstract
With the rapid development of artificial intelligence, it has been
applied to the analysis of the robot and the working space of the robot.
It plays a more and more important role in the application of the robot.
The element restriction method is composed of three elements, which are
the length of the rod, the restriction of the angle and the interference
of the connecting rod. Boundary conditions can be obtained after the
preliminary determination of the limiting element. The arc intersection
method is composed of the process of the inverse kinematics of the
kinematics, the geometric description of the working space and the
calculation process of the working space. Both have their own advantages
and disadvantages, are desirable for the working space of the method.
Key words: artificial intelligence element limit arc intersection
working space
第 1 章 元素限制法的求解
剩余11页未读,继续阅读
资源评论













