两足行走机器人行走控制部分设计.doc
版权申诉
105 浏览量
2023-07-13
21:21:16
上传
评论
收藏 3.37MB DOC 举报


1 绪论
两足步行机器人是指可以使用两只脚交替地抬起和放下,以适当的步伐运动的机
器人,可分为拟人机器人和桌面型两足机器人 (仿人机器人)大小和人相似,不仅具有
拟人的步行功能,而且通常还具有视觉、语音、触觉等一系列拟人的功能;桌面型两
足机器人通常指体积较小,只具有步行功能及其他少数特定功能的两足机器人,例如
具有步行功能和视觉功能的自主踢足球机器人。与拟人机器人相比,桌面型两足步行
机器人的成本较低,除了具有科研性外,还具有广泛地娱乐性,也可以应用在教学和
比赛中。国内外的机器人大赛中,常常可以看到桌面型两足步行机器人的身影
[1]
。
1.1 课题的研究背景和意义
于两足步行机器人的拟人性和对环境良好的适应性等特点,受到各国政府和研究
者的广泛重视,是当今世界的高新技术的代表之一。它在科研、教学、比赛和娱乐等
方面都很到了很好的应用。
江苏省大学生机器人大赛和全国大学生机器人大赛中经常有两足步行机器人,它
可以参加舞蹈机器人比赛、两足竞走机器人比赛、Robocop 类人组机器人踢足球
[10]
器
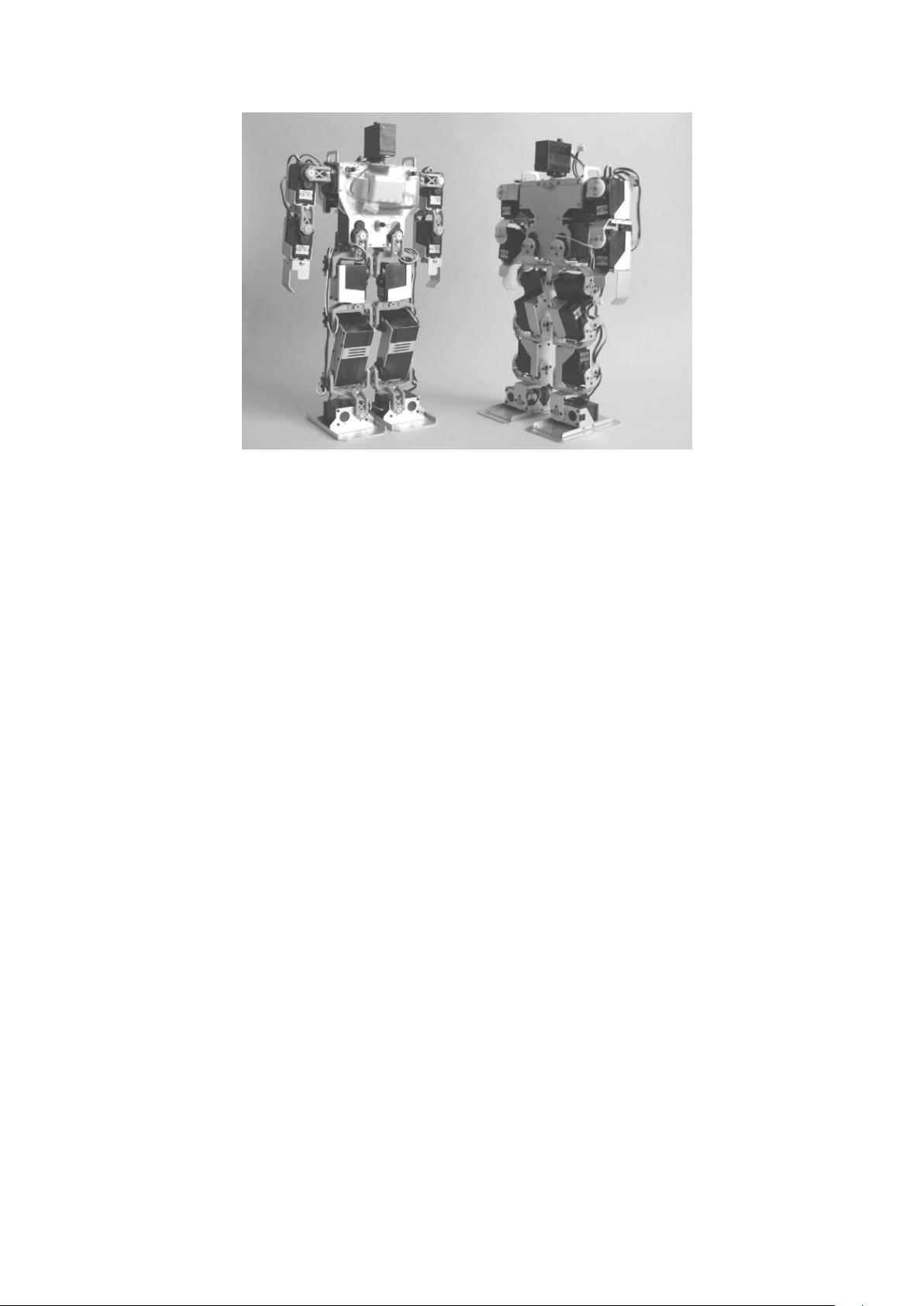
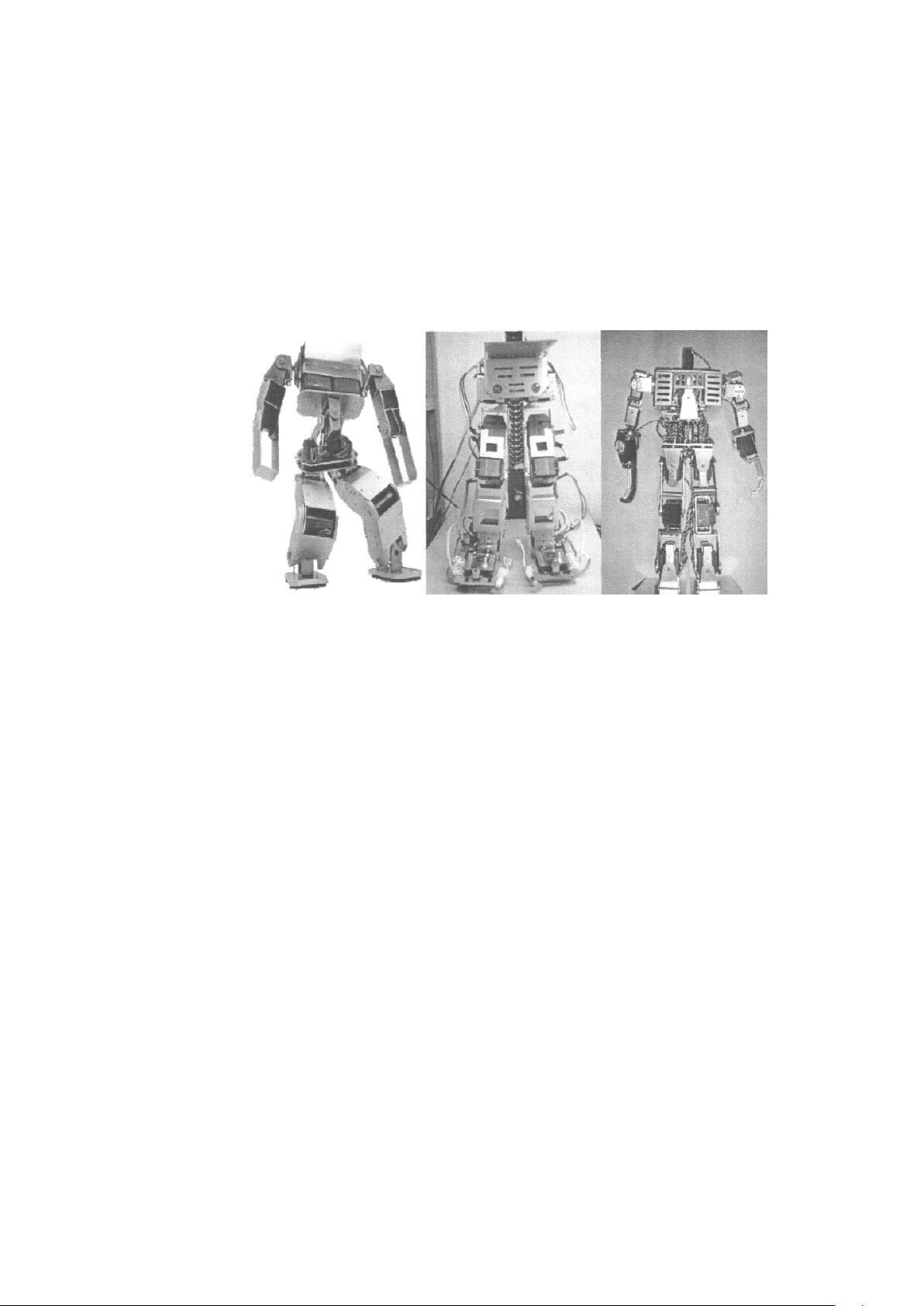
人创新比赛、Robocop 救援组比赛等。舞蹈机器人比赛时使用了日本“KONDO”两足步
行机器人,性能出众,发挥稳定,获得了舞蹈机器人比赛的冠军。但是该机器人是集
成度很高的商业产品,它的控制系统不开放底层代码,难以进行二次开发和步态研究。
所以本文基于机器人控制系统中常用的众多处理器和操作系统各自的特点,并结合
“KONDO”机器人机械结构的特性,选用了高性能、低功耗的 8 位 AVR® 微处理器内
核处理器 ATMega8P 来实现对机器人的控制来。设计的控制系统控制指令精简,控制
转角精度高,波特率可以实时更改,体积小,重量轻,其可作为类人型机器人、仿生
机器人、多自由度机械手的主控制器。随着中国机械产业的不断进步,各高校相继开
设机械类创新课程和比赛,学生可将其应用在各类机械创新作品中,优化控制系统参
加比赛。日本“KONDO”机器人如图 1.1 所示。


剩余30页未读,继续阅读
资源评论


老帽爬新坡
- 粉丝: 83
- 资源: 2万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- java-leetcode题解之第102题二叉树的层序遍历.zip
- java-leetcode题解之第104题二叉树的最大深度.zip
- java-leetcode题解之第173题二叉搜索树迭代器.zip
- java-leetcode题解之第100题相同的树.zip
- java-leetcode题解之第101题对称二叉树.zip
- java-leetcode题解之第128题最长连续序列.zip
- java-leetcode题解之第94题二叉树的中序遍历.zip
- java-leetcode题解之第98题验证二叉搜索树.zip
- java-leetcode题解之第200题岛屿数量.zip
- java-leetcode题解之第130题被围绕的区域.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


