
乐高机器人---运动篇
8.1 简介
灵活的思维造就出了许许多多的机器人,运动使创造物获得了生命,带
来无限的乐趣,同时也对自己的创造力进行了挑战。大多数运动机器人都属于轮
子型与腿型机器人。虽然轮子在光滑的表面很有效,但是在凹凸不平的地面上运
动,腿提供了更有力的方式。底盘结构是为了突出显示它们的传动系统和连接情
况,因此,在实际搭建中还需对此结构加固。
8.2 简单的差动装置
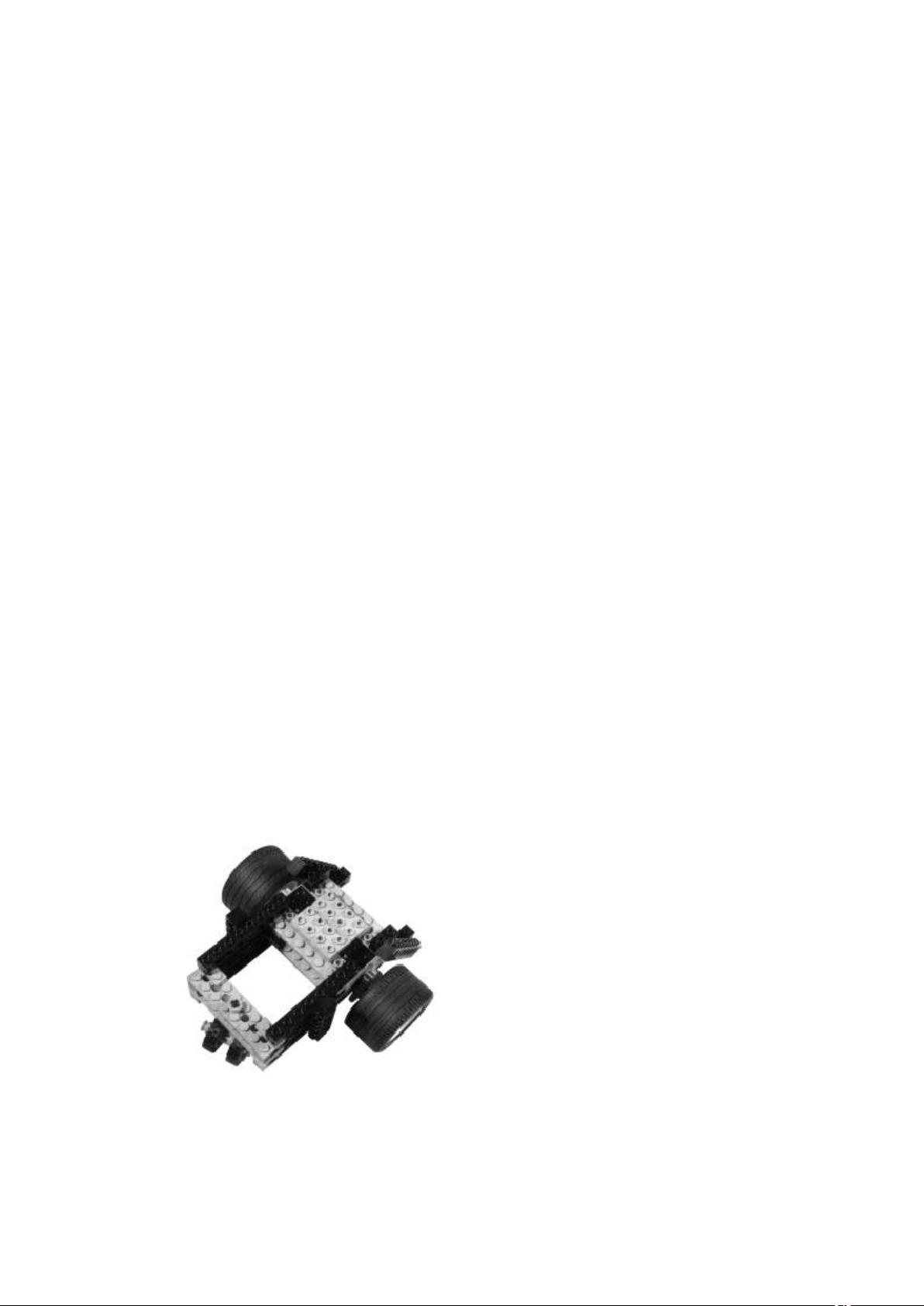
机器人具有很多优点(尤其具有简单性),至少在乐高的可移动机器人
中常用到此结构。差动装置由机器人两边两个平行的驱动轮构成,单独提供动力,
另外有一个或多个轮脚(万向轮)用于支撑重量并不是没有作用(图 8.1)。注
意我们称这个装置为差动装置是因为机器人的运动矢量是由两个独立部件产生
的(它与差速齿轮没有关系,此装置上没有使用差速齿轮)。
当两个驱动轮以相同方向、相同速度转动时,机器人作直线运动。如果
两个轮子转动速度相同,但方向相反时,机器人会绕着连接两轮线段的中心点旋
转。根据轮子不同的转向,表 8.1 列出了机器人的不同运动状态。
图 8.1 简单差动装置

剩余18页未读,继续阅读
资源评论


老帽爬新坡
- 粉丝: 97
- 资源: 2万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- zigbee CC2530无线自组网协议栈系统代码实现协调器与终端基于GenericApp的无线收发例程.zip
- zigbee CC2530无线自组网协议栈系统代码实现协调器与终端无线收发控制LED灯.zip
- zigbee CC2530无线自组网协议栈系统代码实现协调器与终端之间的数据相互收发.zip
- zigbee CC2530无线自组网协议栈系统代码实现协议捕捉与数据分析.zip
- zigbee CC2530无线自组网协议栈系统代码实现终端采集光敏传感器并发给协调器串口输出.zip
- zigbee CC2530无线自组网协议栈系统代码实现终端采集气体传感器值发给协调器并串口打印.zip
- zigbee CC2530无线自组网协议栈系统代码实现终端采集人体红外热释电传感器发送给协调器并串口输出.zip
- 功能完善的小说CMS系统项目全套技术资料.zip
- zigbee CC2530无线自组网协议栈系统代码实现终端采集温度传感器DS18B20发送给协调器并串口打印输出.zip
- 食物营养分析-java-基于 SpringBoot 的食物营养分析与推荐网站的设计与实现(毕业论文)
- zigbee CC2530无线自组网协议栈系统代码实现终端采集温湿度传感器DHT11并发给协调器并串口打印输出.zip
- zigbee CC2530无线自组网协议栈系统的RemoTI源码.zip
- zigbee CC2530无线自组网协议栈系统之新建自己的Zstack工程模板(协调器、终端、路由器).zip
- 宠物救助及领养-java-基于springBoot的宠物救助及领养平台的设计与实现(毕业论文)
- 从基础到高级:Rust语言教程与编程实战
- 城市公交查询-java-基于springBoot的城市公交查询系统设计与实现(毕业论文)
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


