
- 1 -
实验一 LC与晶体振荡器实验
一、实验目的
1)、了解电容三点式振荡器和晶体振荡器的基本电路及其工作原理。
2)、比较静态工作点和动态工作点,了解工作点对振荡波形的影响。
3)、测量振荡器的反馈系数、波段复盖系数、频率稳定度等参数。
4)、比较 LC 与晶体振荡器的频率稳定度。
二、实验预习要求
实验前,预习教材:“电子线路非线性部分”第 3 章:正弦波振荡器;
“高频电子线路”第四章:正弦波振荡器的有关章节。
三、实验原理说明
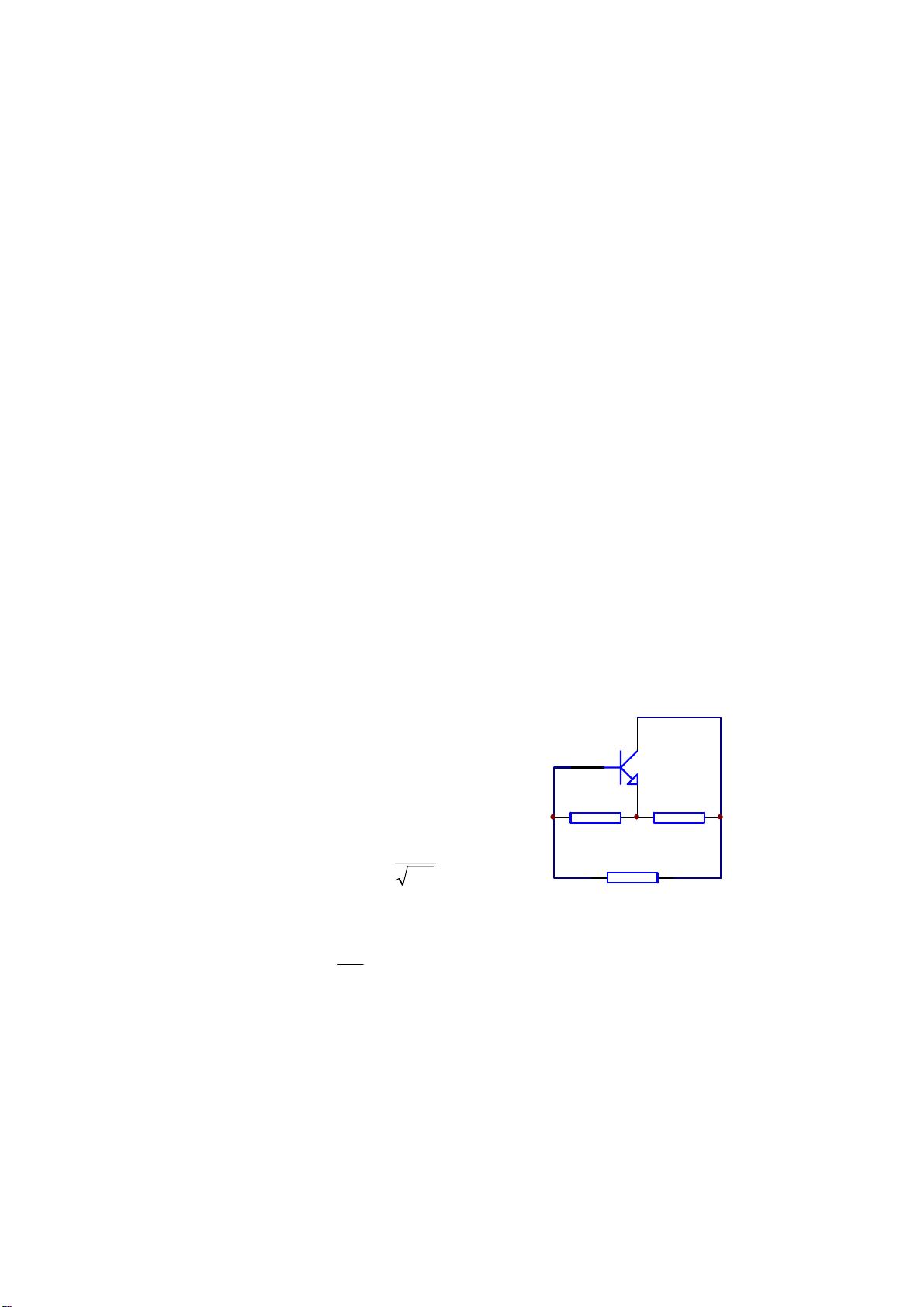
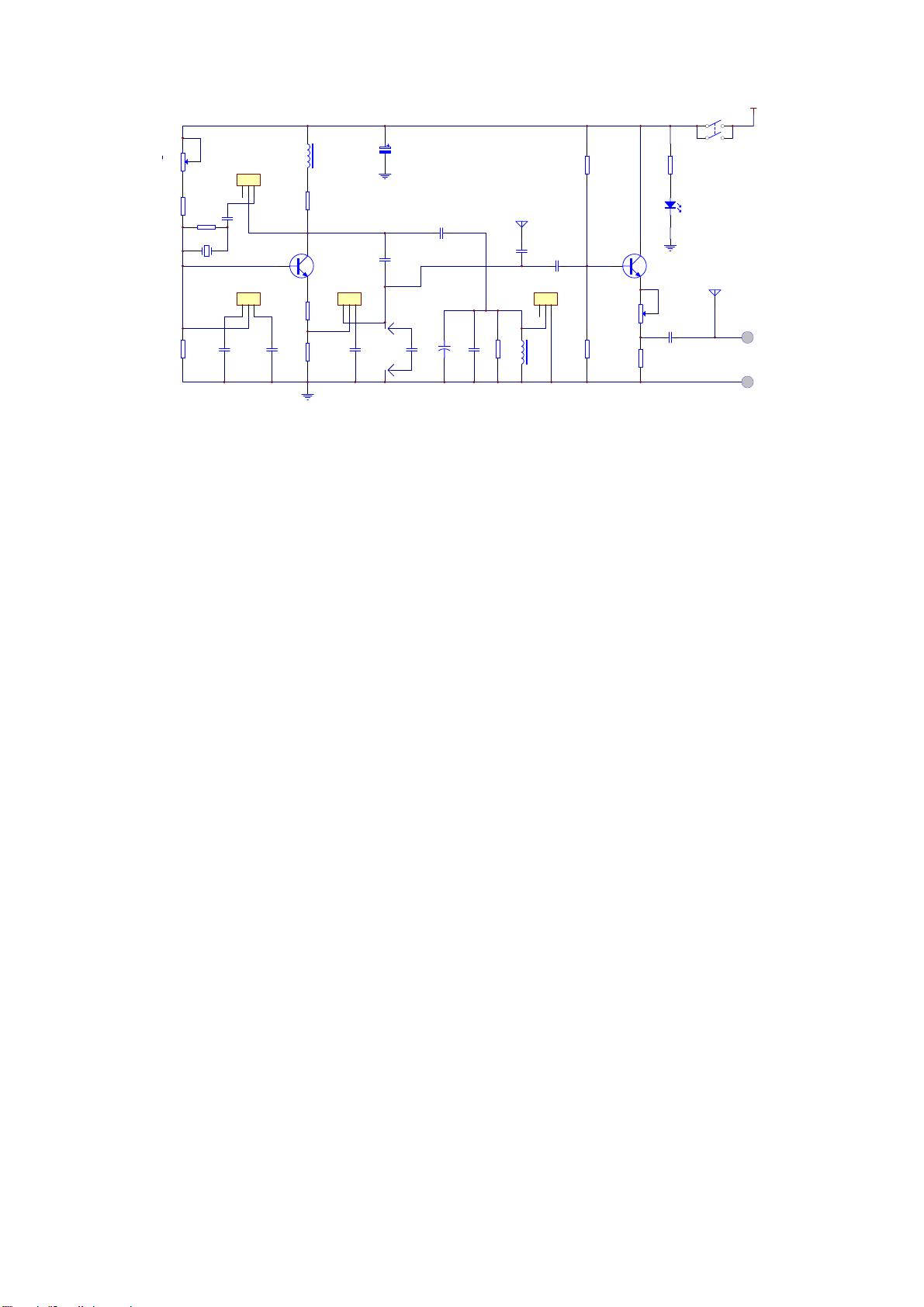
三点式振荡器包括电感三点式振荡器(哈脱莱振荡器)和电容三点式振
荡器(考毕兹振荡器),其交流等效电路如图 1-1。
1、起振条件
1)、相位平衡条件:X
ce
和 X
be
必
需为同性质的电抗,X
cb
必需为异性质
的电抗,且它们之间满足下列关系:
2)、幅度起振条件: 图 1-1 三点式振荡器
式中:q
m
——晶体管的跨导,
Xbe
Vf
e
Xce
Vo
Xcb
b
c
+
_
+
_
LC
XX
XXXc
oCL
cebe
1
||||
)(
=−=
+−=
ω
,
即
)(
A
u
1
*
'
ie
L
oem
qqqFuq ++>
剩余65页未读,继续阅读
资源评论


urapig
- 粉丝: 24
- 资源: 41









最新资源
- matlab储能蓄电池pq控制
- 四轮独立驱动 转向路径跟踪及车辆稳定性控制 模型预测控制MPC 上层4WS+DYC,下层阿克曼转向分配和最小轮胎负荷率驱动力矩分配
- requirements-before.txt
- 基于机器学习的入侵检测系统python源码+文档说明(高分项目)
- 云计算的文件,上次漏的
- 基于机器学习的入侵检测系统python源码+入侵检测技术文档说明
- 基于机器学习的入侵检测系统python源码+报告文档(高分项目)
- pytorch基于LSTM、GRU、BPNN进行时间序列预测源码+数据(高分项目)
- 基于51单片机的自动浇花系统(原理图+程序+PCB或洞洞板+参考论文等)
- pytorch基于LSTM、GRU、BPNN进行时间序列预测源码(高分项目)
- 基于python+opencv实现的柚子缺陷识别检测源码 (高分项目).zip
- CH32V208GBU6-PWM20250107-195029.7z
- 大规模语言模型推理优化:动态裁剪加速长文本情境的LLM生成
- 多目标点路径规划-蚁群+A*算法 室内旅行商问题-送餐移动机器人(从厨房出发到达多个目标点,最后返回厨房) 1,A*算法规划两两之间的路径,并计算路径长度; 2,蚁群算法依据两点之间路径长度,规划
- 永磁同步电机(PMSM)无刷直流电机(BLDC)有限集模型预测控制(MPC) 电机MPC控制 matlab simulink仿真模型(2017) 能很好的运行,并且能达到比较理想的效果,比传统的PWM
- OpenCV4.7.0 编译过程相关资源包
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


