
大连理工大学
基于多项式方法的极点配置
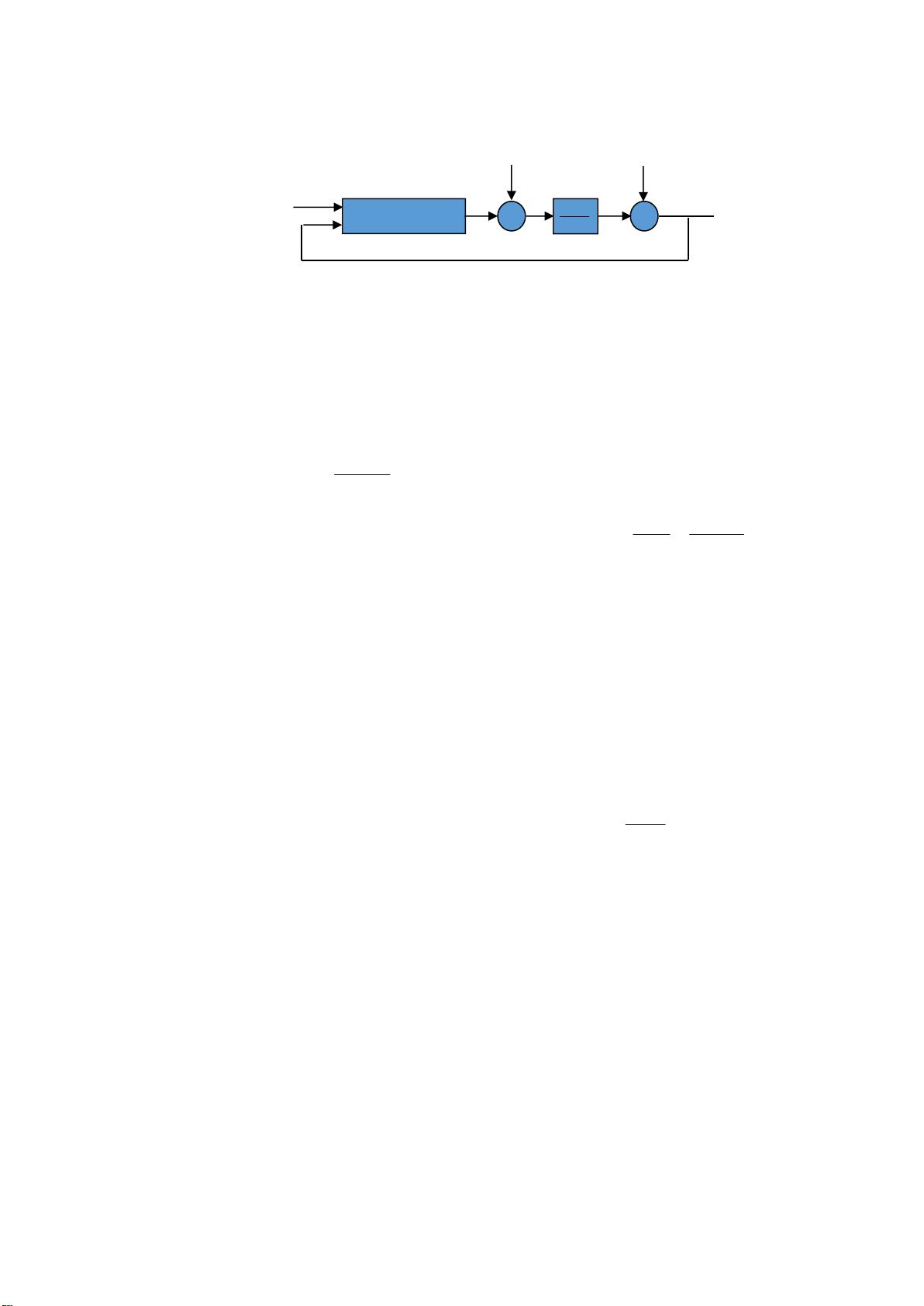
图 1 具有指令信号,负载扰动和测量噪声的闭环系统的框图
系统描述为:
SyTuRu
exy
vuBAx
c
)(
1、过程模型
选取二阶系统
2
15.0
)(
s
s
sG
采样时间
h = 1s
,带零阶保持器的采样脉冲传递函数为:
2
)1()(
)(
)(
z
z
zA
zB
zH
2、性能规范
希望的闭环极点为 0.5,0.6 ,观测器
)(zA
o
为有限拍观测器。
3、控制器设计
(1) 控制器无积分:
2deg A
,
)6.0)(5.0()( zzzA
c
112degdeg SR
丢番图方程:
)()()()()()(
o
zAzAzSzBzRzA
c
1degdegdegdeg
co
ARAA
,
zzA
o
)(
,
2.0
)1(
)1(
0
B
A
t
c
0
)( rzzR
,
10
)( szszS
,
zzAtzT
o
2.0)()(
0
代入丢番图方程得:
zzzrzrszsrz 3.01.1)12()2(
23
001
2
00
3
即
0
7.02
9.0
0
10
00
r
sr
sr
解得:
7.0,9.0,0
100
ssr
控制律:
)()()()()()( zYzSzUzTzUzR
c
即:
)()()()()(
1000
zYszszzUtzUrz
c
z 反变换得:
)1()()1()()(u
1000
kyskyskurkutk
c
SyTuRu
c
A
B
c
u
u
v
x
e
y
资源评论


lCcsdn123
- 粉丝: 4
- 资源: 9









最新资源
- ASL6328芯片规格说明书
- 基于Matlab实现智能体一阶有领导者仿真(源码+数据).rar
- 独立公众号版本微信社群人脉系统社群空间站最新源码+详细教程
- 森林图像数据集(2700张图片).rar
- 《基于Comsol仿真模拟的岩石损伤研究-水力压裂实验探究》,利用Comsol仿真模拟技术精确预测水力压裂过程中岩石损伤情况,comsol仿真模拟水力压裂岩石损伤 ,关键词:COMSOL仿真;水
- 自由方舟管理后台通用模板-基于TDesign二次优化
- 《学习CRUISE M热管理的视频教程及文档解说,无需模型,轻松入门》,CRUISE M热管理视频教程:无模型,文档解说,轻松学习掌握热管理知识,录的CRUISE M热管理视频,有文档解说,没有模型
- 洛杉矶犯罪数据集概览 (2020年至今),犯罪事件数据集,犯罪影响因素
- 电信客户流失数据集,运营商流失客户数据集
- FinalBurn Neo源代码
- 基于积分型滑模控制器的永磁同步电机FOC转速环设计及仿真模型参考,基于积分型滑模控制器的永磁同步电机FOC转速环设计及仿真模型参考,基于积分型滑模控制器的永磁同步电机FOC 1.转速环基于积分型滑模面
- 智能车辆模拟系统:深度探究多步泊车,平行泊车与垂直泊车的仿真应用,《深入探讨carsim仿真技术下的多步泊车策略:平行泊车与垂直泊车的实现与优化》,carsim仿真多步泊车,平行泊车和垂直泊车 ,核心
- BMS模块Simulink开发基于算法,基于Simulink开发的BMS算法:包含SOC计算、故障处理与状态监测的充放电控制策略图解,BMS Simulink 所有算法基于Simulink开发 BMS
- 犯罪率与社会经济因素数据集,探讨了犯罪率与各种社会经济因素之间的关系,如教育水平、就业率、中位收入、贫困率和人口密度涵盖了1000个地区的数据
- ASL6328芯片原理图-V1.1
- 精品源码Javaweb仓库管理系统项目源码
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


