摄像头组标定
需积分: 12 109 浏览量
2014-05-10
12:10:43
上传
评论
收藏 1.53MB PDF 举报

68
www.eepw.com.cn
责任编辑:李健
2010.7
基于视觉传感器的智能车摄像头标定技术研究(下)
Research on Calibration Method for a Smart Car Based on Vision
王建 中国科学技术大学自动化系(安徽合肥 230027)
张晓炜 杨锦 昝鑫 刘小勇 西安交通大学(陕西西安 710049)
摘要:在智能车比赛中,摄像头组肯定要遇到的问题是图像存在梯形失
真,若选用广角镜头,还会存在桶形失真。解决这两种几何失真将对后面
的处理提供方便。本文介绍了作者所在车队的摄像头标定技术。此方法简
单实用,值得借鉴。
关键词:智能车;飞思卡尔;梯形失真;桶形失真;广角镜头
DOI: 10.3969/j.issn.1005-5517.2010.06.011
(接上期)
几何失真校正方法
建模分析
如图7所示
,
世界坐标系中的点
P
(
X
w
,
Y
w
,
Z
w)首先经过刚体变换到
摄像头坐标系中的点
P
(
X
,
Y
,
Z
)
。
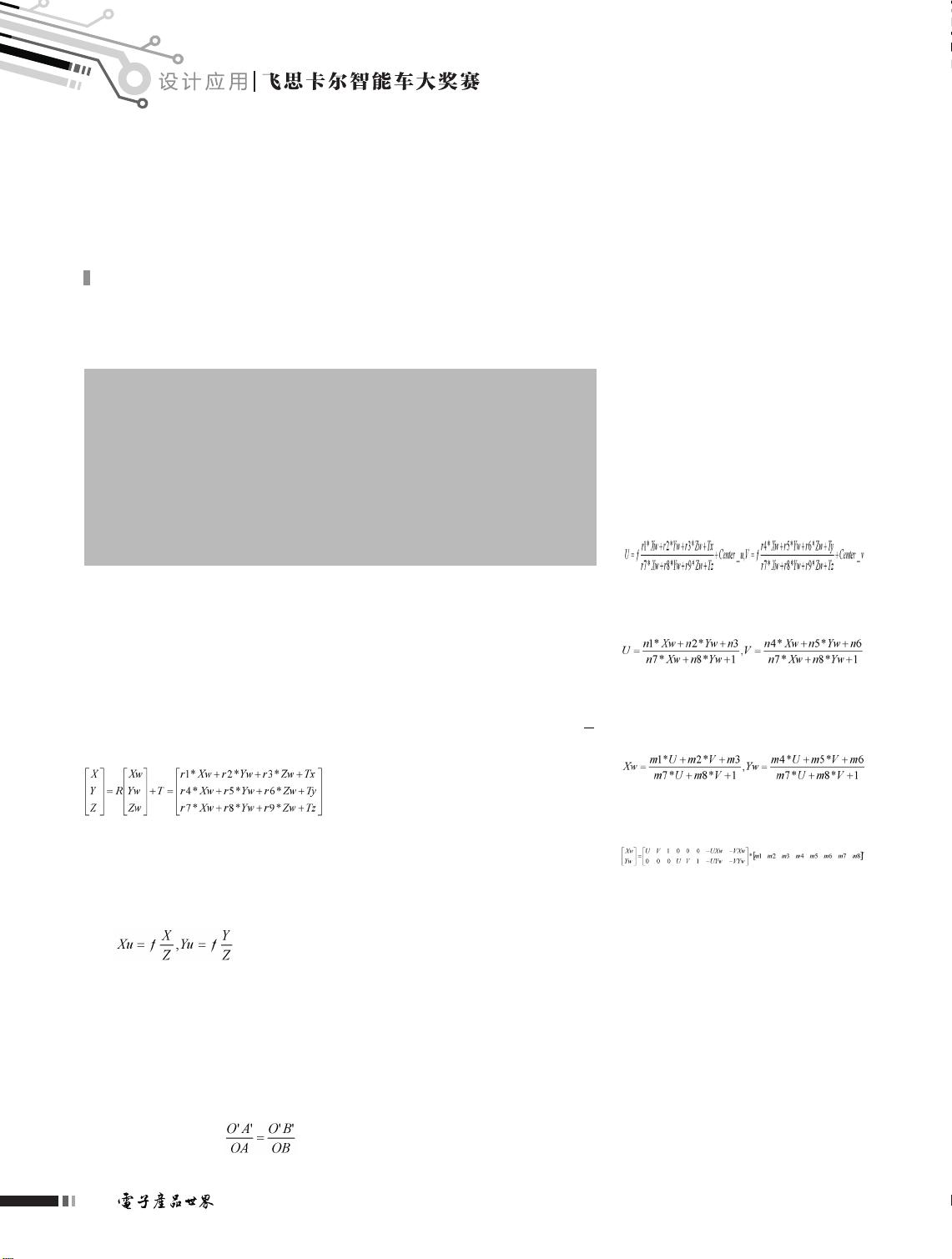
(1)
然后再从摄像头坐标系到理想的
图像坐标系的透视变换
。
(公式2)
图8是一镜头理想成像原理图
,
图中左边的直线是目标
,
右边的直线
是目标所成的象
。
从图中可以看出
,
目标中心点O点成象于象的中心O
′
点
,
目标上不同的两点A点和B点成象
于A
′
和B
′
点
,
且有
。
但
大视场角使得广角镜头不能再等效为
理想透镜
,
而是一个焦距随着目标离
光轴距离增大而减小的成象系统
。
根
据牛顿成象定理
,
目标高度r与对应
象高r
′
之间的计算关系为
'
u
rr
u
=×
。
在物距
m
一定的情 况下
,
焦距
f
愈
小
,
象高
r
′
愈小
。
这样
,
随着目标
离光 轴 距 离
r
的增 加
,
焦距
f
随着 减
小
,
所成图象就产生了桶形失真
。
由
以上的分析可看出
,
桶形失真可以看
成像素点向心径向收缩
,
且随着目标
距光轴距离
r
的增加
,
收缩率增大
。
因此
,
如果使失真图象中的像素离心
径向按不同膨胀率增大
,
即可实现几
何失真校正
。
实验方法
情况(1)
:
摄像头俯角小
,
虽有
桶形失真
,
但关键区域处于图像中
部
。
如图9所示
。
分段逆透视变换适
用于这种情况
。
若 忽 略 桶 形 失 真
,
即 让
U
=
X
u+Center_u
,
V
=
Y
u +Center_v(注
意图7中图像原点Ouv在摄像头坐标
系中坐标为(- Center_u
,
- Center_v
,
f))
,
则由公式1和公式2可知
,
(3)
由于
Z
w=0
,
上式又可写成:
(4)
反解
X
w
,
Y
w
,
可得:
(5)
上式又可写成:
(6)
理论上根据4个点m1-m8就可以
有一组解
。
实验步骤如下
:
以车头为原点
,
在车头前选取8个点
,
如图10所示(单
位
:
cm)
。
选点要求范围尽量大
,
跑
道经常出现的区域
,
但又不能处于
摄像头输出图像边缘区域
;
从图9中
读出各点像素坐标(a
,
b)
;
根据分辨
率将各像素坐标转换为单片机图像
坐标
,
这是一个线性变换
;
将8个点
43
201007.indd 68 2010-6-28 14:18:42
资源评论














