
MTi 学习笔记
2014-01-09
1. 介绍
MTi 是集成了 3D 磁力仪(3D 指南针)的完整的微型惯性测量
单元,带有一个能够实时计算滚动,俯仰和偏航的嵌入式处理器,能
够输出校准的 3D 线性加速,旋转速度(陀螺仪),和(地球)的磁场
数据,支持各种先进的 IO,如 RS-232/422 和模拟输出(DAC)等。
2.同 MTi 的直接的底层通信
MTi 可直接连接 RS-232/422(注意它不是 TTL 电平,因此需要转
换一下才能和单片机等通讯),只需根据 MTi 的二进制通信协议以流
(自由运行)模式或轮询(请求)模式通过串口索要数据即可。(C++
类库‘CMTComm’软件包中包含了 MT 通信的源代码(C++))
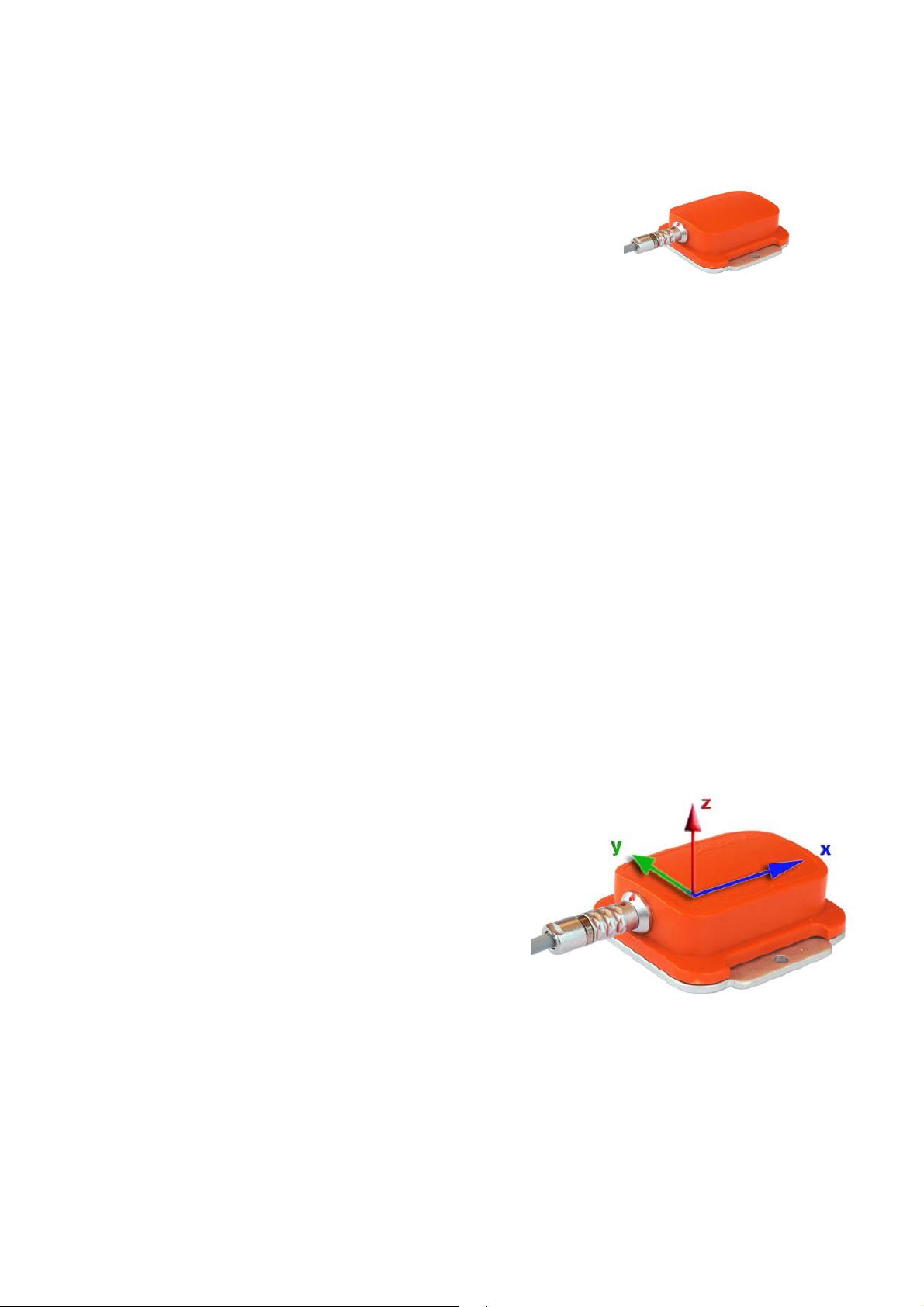
3.坐标系统
● X 轴的正向指向地球磁场北极
● Y 轴符合右手坐标系(西)
● Z 轴正向朝上
4.输出模式
● 四元数单位(又称为欧拉参数)
● 欧拉角
7
、旋转、俯仰、偏航(航天序列)
资源评论













