
SCIENCE CHINA
Technological Sciences
© Science China Press and Springer-Verlag Berlin Heidelberg 2011 tech.scichina.com www.springerlink.com
*Corresponding author (email: shugen@se.ritsumei.ac.jp)
• RESEARCH PAPER •
March 2011 Vol.54 No.3: 610–624
doi: 10.1007/s11431-010-4228-5
Analysis of the constraint relation between ground and self-
adaptive mobile mechanism of a transformable wheel-track robot
LI ZhiQing
1,3
, MA ShuGen
1,2*
, LI Bin
1
, WANG MingHui
1
& WANG YueChao
1
1
State Key Laboratory of Robotics, Shenyang Institute of Automation, Chinese Academy of Sciences, Shenyang 110016, China;
2
Department of Robotics, Ritsumeikan University, Shiga-ken 525-8577, Japan;
3
Graduate School of the Chinese Academy of Sciences, Beijing 100039, China
Received June 25, 2010; accepted November 26, 2010; published online January 27, 2011
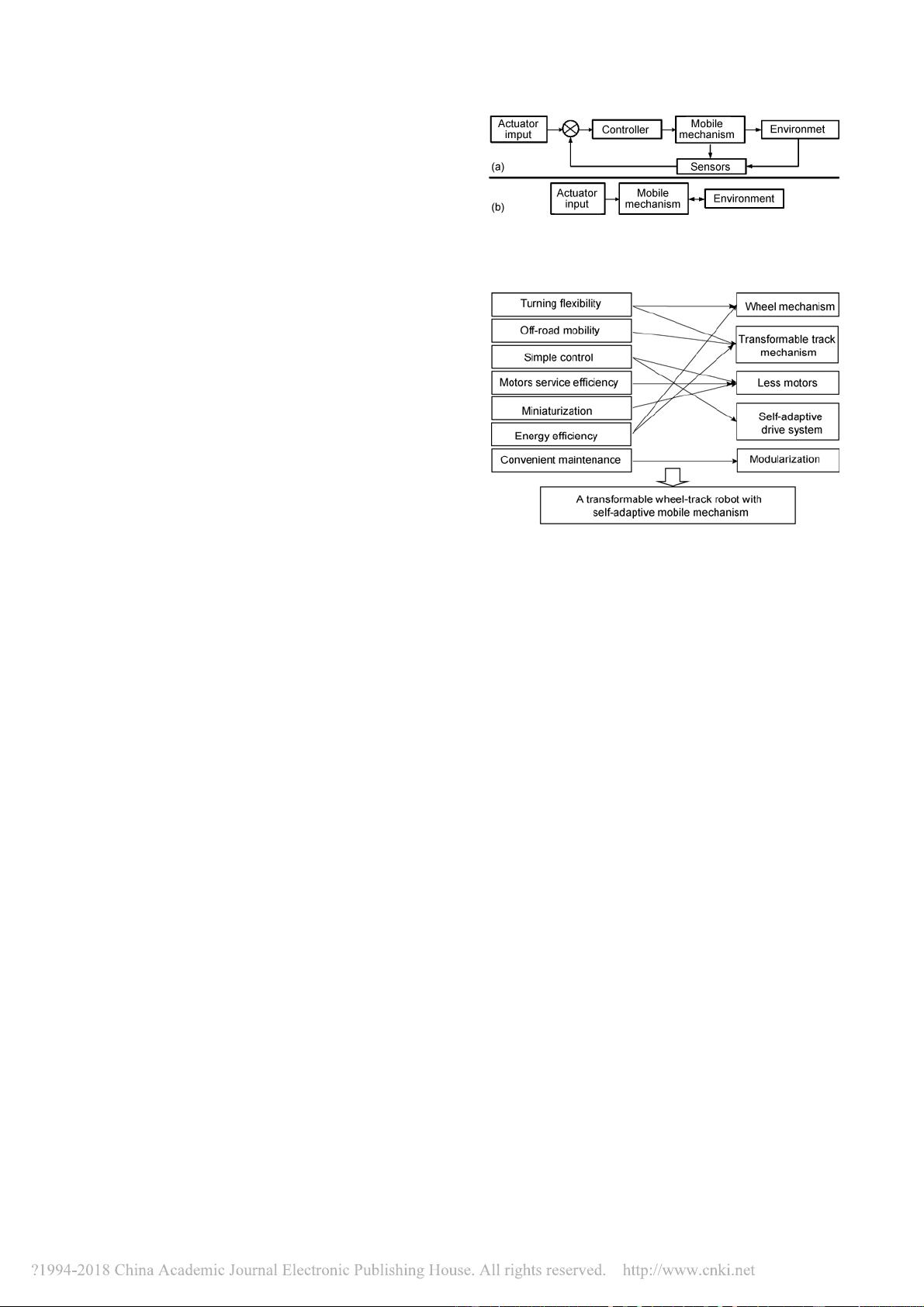
To maneuver in unstructured terrains where the ground might be soft, hard, flat or rough, a transformable wheel-track robot
(NEZA-I) with a self-adaptive mobile mechanism is proposed and developed. The robot consists of a control system unit, two
symmetric transformable wheel-track (TWT) units, and a rear-wheel unit. The TWT unit is the main mobile mechanism for the
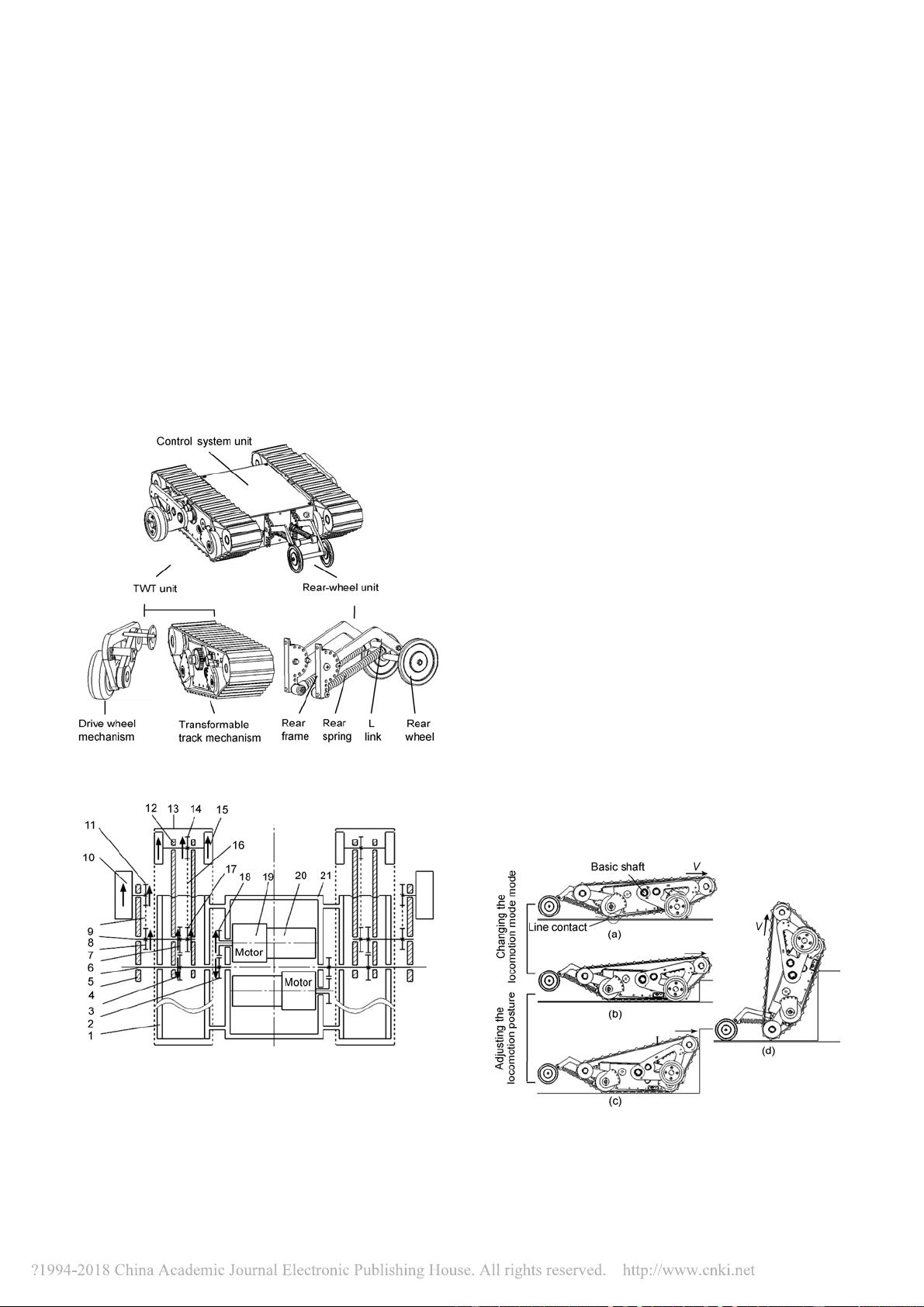
NEZA-I robot, with the rear-wheel unit acting as an assistant mechanism. Driven only by one servomotor, each TWT unit can
efficiently select between track mode and wheel mode for optimal locomotion, autonomously switching locomotion mode and
track configuration with changes in the terrain. In this paper, the mechanism structure, the self-adaptive drive system, the lo-
comotion mode and posture of the NEZA-I robot are presented, the kinematic relation of the inside parts of the TWT unit is
analysed, and the mathematic model of the constraint relation between the mobile mechanism and the ground, abbreviated to
“MGCR model” is set up for the NEZA-I robot to go through some typical unstructured environments. The mechanism pa-
rameters, which influence the self-adaptability of the NEZA-I robot, are found and optimized. Basic experiments show that the
mobile mechanism has the self-adaptability to navigate in unstructured terrains and has superior obstacle-negotiating perform-
ance, and that the MGCR model and the analysis method of mechanism parameters are reasonable. From a mechanism point of
view, it can provide an idea for research on the adaptive control of the robot.
self-adaptive mobile mechanism, transformable track, wheel-track hybrid robot, mechanism design
Citation: Li Z Q, Ma S G, Li B, et al. Analysis of the constraint relation between ground and self-adaptive mobile mechanism of a transformable wheel-track
robot. Sci China Tech Sci, 2011, 54: 610624, doi: 10.1007/s11431-010-4228-5
1 Introduction
In the past few decades, some robots help human perform
dangerous missions in complex and unpredictable environ-
ments, such as rescue, scientific expedition, removing ex-
plosive, surveillance, and so on. The robot might go through
regular environments or through unstructured environments
where the ground might be soft, hard, flat or rough. When a
sudden disaster occurs, the robot should be able to go
through an unstructured terrain quickly to arrive at its des-
tination in time. So, these robots are required to have
prominent traversability and adaptability in unstructured
terrains.
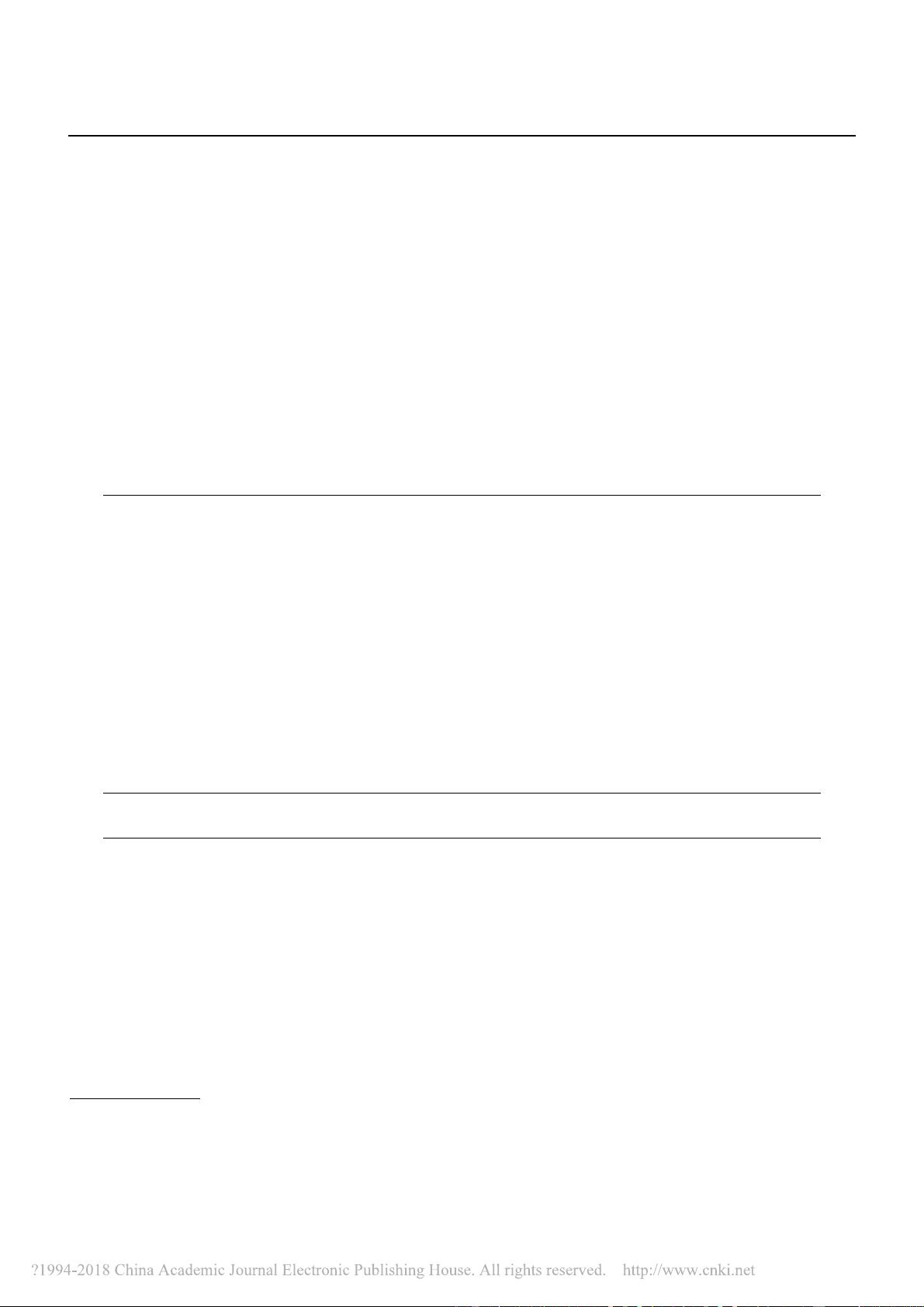
Robot track mechanisms are categorized into two classes:
an “F-track mechanism” has tracks in a fixed configuration,
while the track configuration of a “T-track mechanism” is
transformable. Robot hybrid mechanisms are another kind
of mobile mechanism and include wheel-track type mecha-
nisms, wheel-leg type mechanisms, wheel-track-leg type
mechanisms, and so on. Depending on the terrain feature to
be traversed, hybrid mechanism robots and T-track mecha-
nism robots can switch locomotion mode and posture or
剩余14页未读,继续阅读
资源评论


u011107790
- 粉丝: 0
- 资源: 10









最新资源
- 高校毕业生就业信息-JAVA-基于springboot的高校毕业生就业信息管理系统(毕业论文)
- node-red-contrib-opcua-test.json
- 高校社团管理-JAVA-基于springBoot的高校社团管理系统的设计与实现(毕业论文)
- 基于pytorch实现的ghostnetv1、v2、v3对10种鸟类图像识别【完整代码+数据集】
- 医疗设备管理-JAVA-基于springboot的医疗设备管理系统设计与实现(毕业论文)
- 基于AT89C52单片机的6位电子密码锁设计-14.zip
- 解决用STM32CubeMX配置FreeRTOS时头文件丢失问题
- 古城景区-JAVA-基于Spring Boot的古城景区管理系统的设计与实现(毕业论文)
- 2024全国大学生软件测试大赛Web赛项-省赛真题
- 商用密码,我国商用密码行业发展介绍
- 交通旅游订票-JAVA-基于spring boot的交通旅游订票系统设计与实现(毕业论文)
- 商用密码法律法规及标准体系解读V1.8-240827
- 流浪动物救助-JAVA-基于spring boot的流浪动物救助系统的设计与实现(毕业论文)
- Hadoop与Spark集群搭建及中文字频统计与Titanic数据分类实战
- 中国飞行器设计大赛圆筒权重文件
- 学生成绩管理-JAVA-基于spring boot的软件学院学生成绩管理系统的设计与实现(毕业论文)
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


