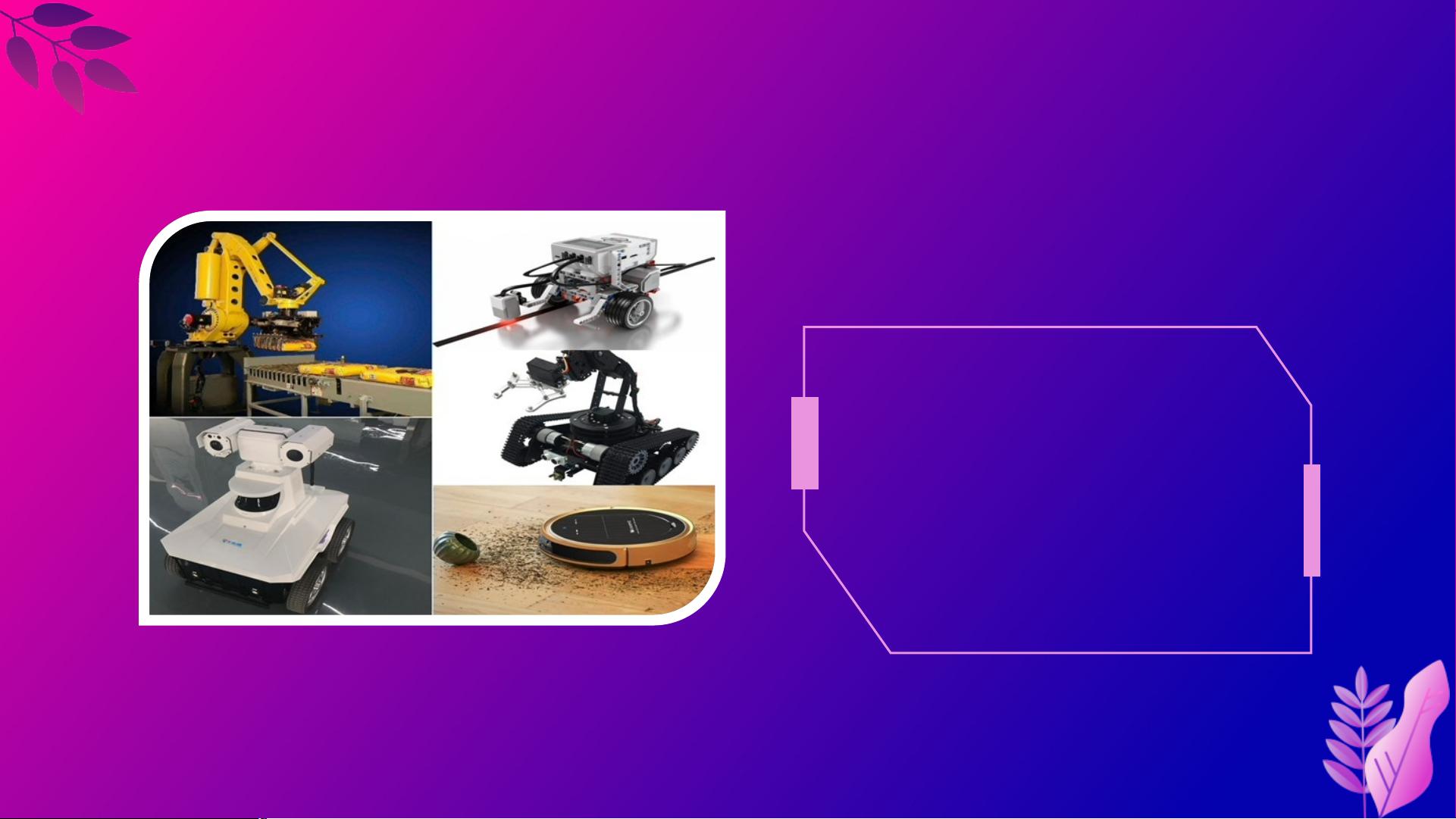
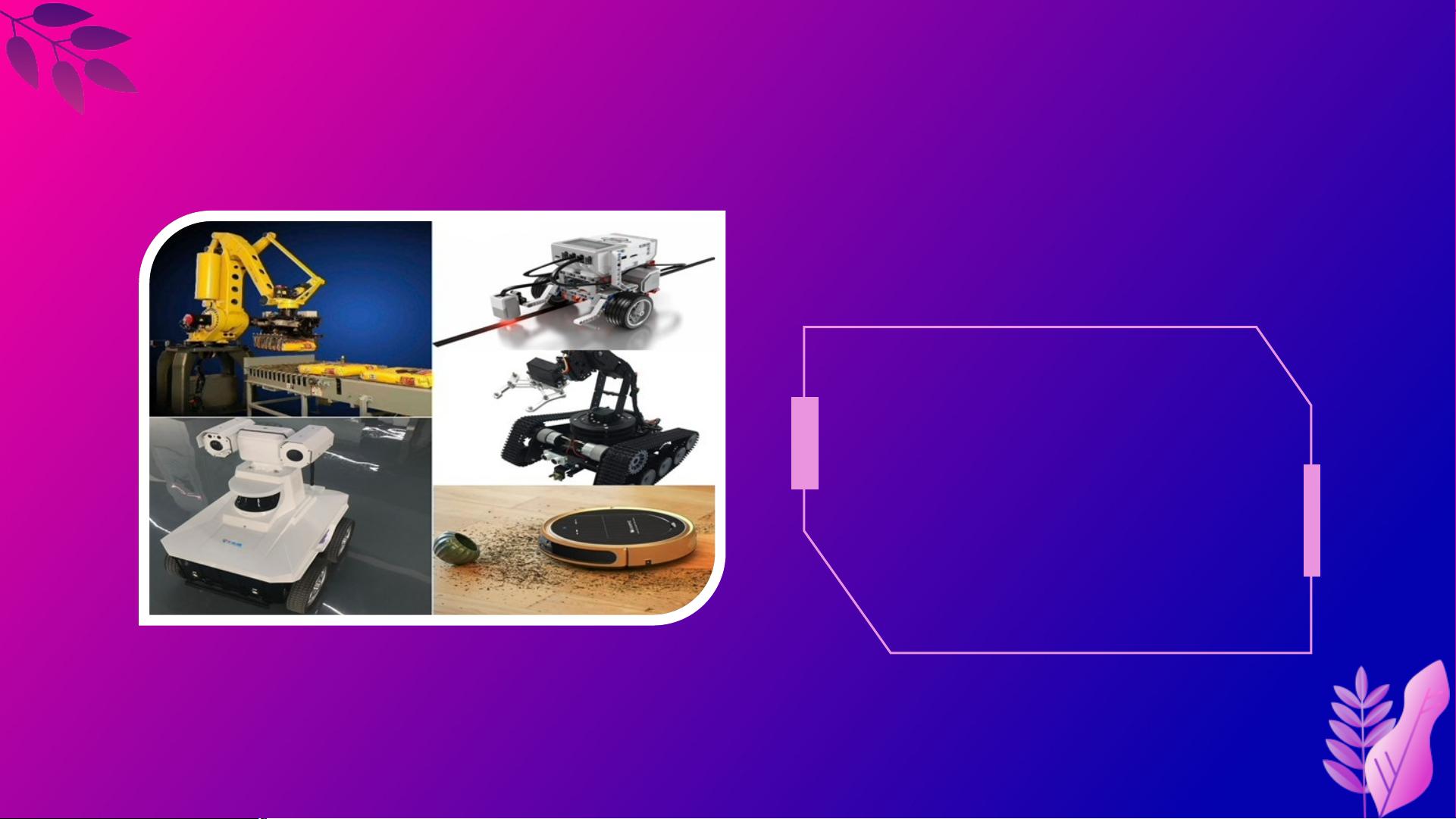
【智能机器人技术】是当前科技领域的一个热点,它涉及到机器人的感知、决策和执行等多个方面。在这个名为"扎气球机器人课件.pptx"的资料中,我们深入探讨了一个具体的智能机器人项目——扎气球机器人。这个机器人是第二代感觉控制型机器人,具备视觉感知能力,能够识别并扎破特定颜色的气球。
该机器人采用四轮驱动结构,由舵机(电机模式)组成的执行系统负责驱动,而扎气球的动作则是由一个由舵机控制的机械臂完成。视觉传感器与Woody控制器协同工作,形成传感系统,用于发现气球。红外传感器作为距离检测装置,帮助机器人判断与气球的距离。Luby传感器则在控制系统中起到决策作用,根据接收到的信息指挥机器人的行动。电源系统采用白盒电池,为整个机器人提供动力。
Woody控制器是机器人的心脏,它搭载了强大的Cortex-A53处理器,运行Linux操作系统,能实时处理语音和图像信息,并且拥有多种接口,便于与其他设备连接。配合LuBy控制器,机器人可以实现语音识别和视觉追踪功能。同时,使用罗技C170网络摄像头,通过USB接口与Woody控制器相连,提供高清视频输入,内置麦克风则辅助进行声音采集。
项目实施过程中,首先需要按照搭建手册组装机器人,包括连接控制器、外设以及各个舵机。然后,编写程序,通过流程图描绘机器人的行为逻辑。当程序运行时,机器人会初始化,通过摄像头寻找绿色气球。如果未找到,机器人会原地左转,直到发现目标。一旦找到气球,通过红外传感器判断是否接近,接近则执行扎气球动作,之后再次寻找新的目标。
在编程和调试阶段,摄像头的图像捕捉和颜色识别是关键。图像捕捉时需确保气球完全被选中的色框覆盖,避免误判;颜色识别则要调整识别框大小,以适应不同距离的气球。整个项目需要对各种参数进行微调,包括舵机速度、角度和延时,以适应不同环境和气球特征。
在总结提高阶段,强调了机械臂的长度、红外传感器的感应距离调整对于提升扎气球准确性和成功率的重要性。同时,机器人程序中的数值应随实际环境和目标的变化进行动态调整,以保证其在各种情况下的有效工作。
这个扎气球机器人项目不仅展示了智能机器人技术的基本原理,还涵盖了传感器应用、控制系统设计、硬件组装和软件编程等多个方面的综合实践,对于理解和掌握智能机器人技术有着重要的学习价值。











评论0
最新资源