(1) (2) (3) 三种形式所呈现的非线性程度 图 三种特殊形式的特性曲线 2.灵敏度:在稳态下输出增量与输入增量的比值: 对线性传感器,其灵敏度就是它的静态特性的斜率: 非线性传感器灵敏度是一个变量,只能表示传感器在某一工作点的灵敏度。 3.重复性: 输入量按同一方向作全程多次测试时,所得特性曲线不一致的程度。 图 重复性 y x 0 ?Rmax2 ?Rmax1 3.重复性: 4.迟滞(回差滞环)现象: 表明传感器在 正向行程和反 向行程期间, 输出-输入特性 曲线不重合的 程度。 ΔH 0 x y yFS xFS 图 迟滞特性 机器人传感器与检测技术 机器人传感器与检测技术 * * 机器人传感器 与检测技术 项目一 自动测控系统与机器人传感器基础 1.传感器的静态特性 学习内容 传感器的基本特性 静态特性 1.线性度: 输出量与输入量之间的实际关系曲线偏离直线的程度。又称非线性误差。可用下式表示: ?max—输出量与输入量实际曲线与拟合直线之间的最大偏差 yFS—输出满量程值 传感器的静态模型有三种有用的特殊形式: (1) 理想的线性特性 (2) 仅有偶次非线性项 (3) 仅有
【机器人传感器技术基础:传感器的静态特性】
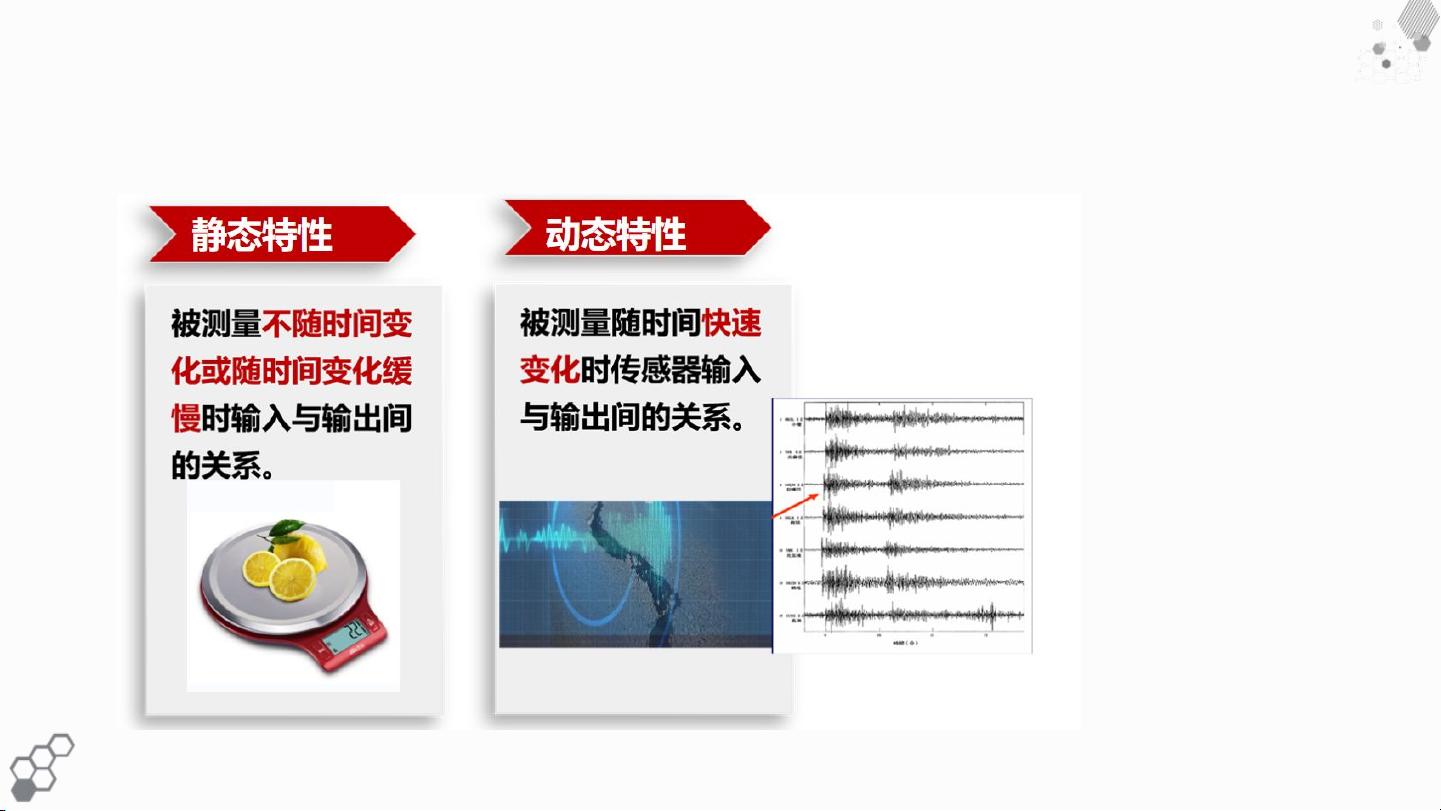
在自动化和机器人技术中,传感器起着至关重要的作用,它们负责捕捉和转换各种物理信号,如位置、力、速度等,为控制系统提供必要的信息。传感器的静态特性是衡量其性能的重要指标,包括线性度、灵敏度、重复性和迟滞。
1. **线性度**:
线性度描述了传感器输出与输入之间的关系是否接近理想直线。非线性误差是指实际输出曲线与拟合直线之间的最大偏差。线性度越好,传感器的输出与输入成比例的程度越高。通常用非线性误差E来表示,计算公式为:E = (ymax - y0) / yFS,其中y0是拟合直线与输出轴的交点,ymax是实际曲线的最大偏差,yFS是输出满量程值。传感器的静态模型可以分为三类:理想的线性特性、仅有偶次非线性项和仅有奇次非线性项。
2. **灵敏度**:
灵敏度是衡量传感器响应速度的指标,定义为稳态下输出增量与输入增量的比值,即S = dy/dx。对于线性传感器,灵敏度是常数,等于静态特性的斜率。但对于非线性传感器,灵敏度会随输入变化而变化。
3. **重复性**:
重复性是评估传感器在相同条件下进行多次测量时,输出特性曲线一致性的好坏。如果输入量按同一方向进行全程测试,所得特性曲线的差异反映了重复性的优劣。重复性差意味着传感器在同一输入下的输出不稳定。
4. **迟滞(回差滞环)**:
迟滞现象发生在传感器的正向行程和反向行程之间,表现为输出-输入特性曲线不重合。迟滞量ΔH是最大滞环误差,即在同一输入信号下,正反行程输出的最大差值与满量程输出值的比例,称为最大滞环率H%。
5. **分辨率与阈值**:
分辨率是传感器能够检测到的输入量最小变化的能力,它是传感器对微小变化敏感度的体现。阈值则是使传感器输出产生可测量变化所需的最小输入量,是传感器在零点附近的分辨力。
了解并优化这些静态特性对于设计高精度、高稳定性的机器人系统至关重要。例如,高线性度能确保传感器在宽范围内准确测量,高灵敏度则能捕捉微小的变化,而低迟滞则意味着传感器在正反行程中表现一致,提高系统的可靠性。在实际应用中,需要根据具体任务需求选择和校准传感器,以达到最佳的测量效果。













评论1
最新资源