

使用卡尔曼滤波器在 3D 深度专人跟踪空间
摘要:手势是自然语言在许多研究领域,如用于一类重要的人机交互和计算机视觉。手势识
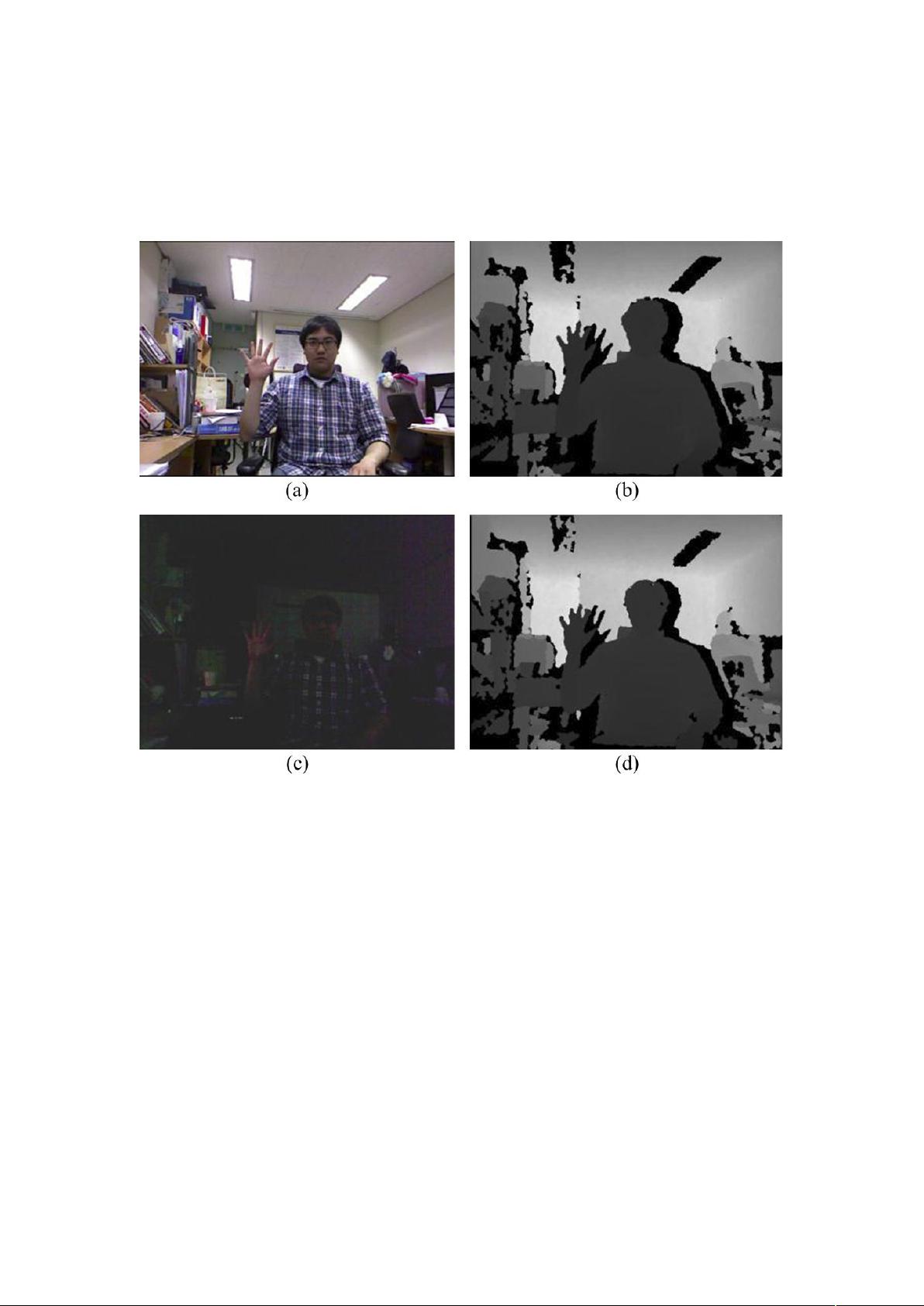
别需要事先确定手的位置的通过检测和跟踪。一个用于跟踪手的最有效的策略之一是使用
2D 视觉信息,如颜色和形状。然而,视觉传感器为基础的专人跟踪方法是非常敏感的,
当
可变光条件下进行跟踪。此外,由于手的动作是在三维空间中,使用二维信息手势识别性
能在本质上是有限的。在这篇文章中,我们提出了一个在深度空间使用 3D 深度感应器和
采用卡尔曼滤波新颖的实时 3D 手势跟踪方法。我们发现使用运动集群和预定义的波动手
候选人,并采用跟踪手的位置 Kalman 滤波器。为了验证该方法的有效性,我们比较建议
的表现方法与视觉为基础的方法。实验结果表明,该方法的性能出进行视觉为基础的方法。
1 引言
近日,人机交互(HCI)技术已引起关注,因为一个有前途的人机交流方法。人机交
互的进步已经为首的计算能力的相关发展,各种传感器,以及显示技术[1,2]。
在人对人际交往方式的兴趣 人机交互也有所增加。这些措施包括人类的手和手臂的运
动。人类手势都是非语言的沟通,从范围简单的指向人与人之间复杂的相互作用。手势主
要优点是沟通的能力在距离[3]。对于使用手势 HCI 要求的人的手的构可以通过电脑是可
以衡量的。性能高度依赖于检测与跟踪的准确度手位置。目前手头检测与跟踪方法是使用
各种传感器,包括直接附着于手,特殊功能的手套,和颜色或深度图像[4-7]。
通过图像传感器的手部侦测与追踪可能与 2D 或 3D 信息进行。然而,由于获得 3D 信
息需要高计算能力和高性价比的设备,2D 方法已经比较发达比 3D。在 2D 手工检测与跟
踪方法,
最常用的方法是一种视觉为基础的方法,其使用的信息,如颜色,形状,和边缘。视觉为
基础的方法可归类为基于颜色的和基于模板的方法。在基于颜色的方法开始通过使用颜色
信息查找手区域(RGB,HSV,YCbCr 图像)。然后,颜色直方图是由从检测到的手。在
此基础上的颜色直方图这是类似于手的颜色的区域,可以跟踪[8,9]。基于模板的方法创建
一个边缘图像通过彩色或灰度图像。边缘图像是相匹配的训练手模板,然后手被跟踪
[10]。
然而,手部动作通常发生在 3D 空间。然后,2D 方法只能使用二维信息,这消除了沿
ZAXIS 的移动信息。这使得 2D 方法的固有局限性。近日,装备获取 3D 信息变得更快,
更准确,并符合成本效益。这设备包括深度传感器,如 TOF 相机和 PrimeSensor[11]。
该设备的出现后,
实时 3D 手势跟踪方法发展迅速。例如,布鲁尔等人。 [12]用一个红外线 TOF 相机来创建
一个接近实时的手势识别制度。 Grest 等。 [13]提出了一种人体运动使用深度和轮廓的组
合跟踪方法信息。
在这篇文章中,我们提出了一种新的实时 3D 手使用 PrimeSensor 与深度空间跟踪方
法
Kalman 滤波器。我们从生成的运动图像深度图像。然后,我们检测手使用的候选运动集
群和预定义的波动,并跟踪使用卡尔曼滤波器的手的位置。
本文的结构如下。在第 2,相关工作进行了简要综述。在第 3 节,预处理的深度信息
和建议手检测和跟踪方法进行了描述。在第 4 节,我们的专人跟踪系统的几个实验进行。
最后,我们的文章中第 5 节。

剩余18页未读,继续阅读
资源评论


u010843609
- 粉丝: 0
- 资源: 7









最新资源
- AIGC在通信资源管理&机房运维场景的应用研究
- AIGC在开源军事装备数据知识百科的应用探究
- C# 中高效处理大规模数据文件的技术与实战技巧
- 高效PDCA工作法:从计划到调整的管理四步骤指南
- 特斯拉Model S 维修手册 - 技术指南及安全操作规范
- shia.20241127
- Python实验报告2023(2)_QQ浏览器转格式.docx
- 基于matlab模拟和分析各种排队系统实验源码(如MM1、MM1K、MMcc、MM2和开放式Jackson网络,含说明、代码和报告).zip
- 向 Swift 公开 DirectX 12 的低级接口 .zip
- C#上位机中海康威视SDK的应用实例与关键技术详解
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


