### 声音导引系统设计相关知识点
#### 一、系统概述
声音导引系统是一种利用声音信号来实现目标定位或导航的技术。本研究针对一种特定的声音导引系统进行了设计与实现,旨在通过分析声音传播特性及信号处理技术来实现对移动声源的有效跟踪与定位。
#### 二、系统组成与原理
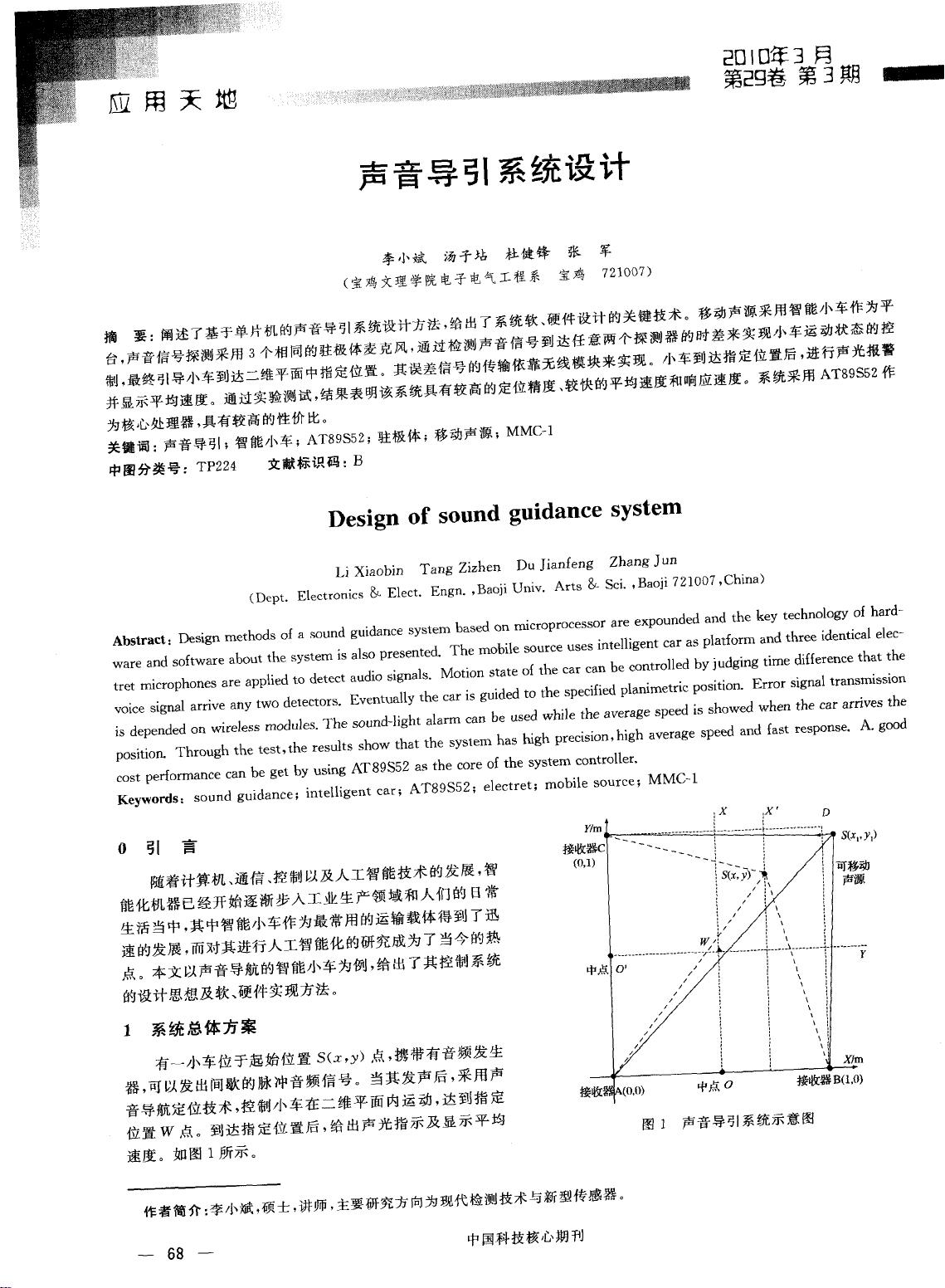
该系统主要包括两个核心部分:**移动声源系统**和**位置信号检测系统**。其中,移动声源系统负责发射声音信号;而位置信号检测系统则通过多个接收器捕捉声音信号,并通过信号处理来计算声源的位置信息。
#### 三、移动声源系统
- **设计**: 采用移动小车实现,配备有声音发生装置。
- **功能**: 定期发射周期性音频脉冲信号。
- **应用场景**: 本研究中的移动声源系统主要用于实验室环境下的测试与验证。
#### 四、位置信号检测系统
- **组成**: 包括三个驻极体麦克风(A、B、C),用于接收来自移动声源的声音信号。
- **工作原理**:
- **声音时差测量**: 当声源发射声音后,不同位置的接收器会因为距离差异而接收到不同的声音信号,形成声音时差。
- **位置误差计算**: 通过单片机处理这些时差信息,转换为位置误差数据。
- **无线通信**: 通过无线模块将位置误差信息发送给移动声源系统。
#### 五、系统控制方案
- **方案1: 三点精确定位声源法**
- **原理**: 利用三个接收点的时差信息构建数学模型,通过解方程组来确定声源的精确位置。
- **优点**: 定位精度高。
- **缺点**: 计算复杂,不适合实时处理。
- **方案2: 时序比较法**
- **原理**: 通过比较不同接收点接收到信号的先后顺序来控制移动声源的运动方向。
- **优点**: 实现简单,易于操作。
- **缺点**: 定位精度相对较低。
- **最终选择**: 方案2因其简便性和实用性被选为本系统的设计方案。
#### 六、无线传输方案
- **选择依据**: 考虑到系统只需要传输控制指令而非精确位置数据,因此选择了基于PT2262和PT2272的低成本无线收发模块。
- **特点**: 成本低廉,实现简单。
- **应用**: 用于控制小车的运行状态。
#### 七、移动声源的速度检测
- **原理**: 通过红外线对射式测速码盘来检测移动声源的速度。
- **组成部分**: 遮光盘、红外光电耦合器和凹槽型支架。
- **计算公式**: 通过计算小车从起始位置到停止位置的总脉冲数、总圈数和运行时间来计算平均速度。
#### 八、系统误差的产生与修正
- **误差来源**:
- 声音信号的接收、处理速度不一致导致的误差。
- 多普勒效应引起的误差。
- 假设声音信号按照圆形传播方式造成的误差。
- **修正措施**:
- 提升接收站点的灵敏度一致性。
- 考虑多普勒效应的影响,在算法设计中加入相应的补偿机制。
- 优化信号处理算法,提高声音信号接收与处理的速度。
#### 九、结论
通过上述设计方案和技术实现,本研究成功地开发了一套声音导引系统。该系统能够有效跟踪和定位移动声源,适用于多种场景下的导航需求。未来的研究可以进一步探索提高定位精度的方法,以及优化系统的整体性能。