### 数字近景摄影测量知识点概述
#### 一、摄影全站仪
##### 1.1 相机检校
**非量测型数码相机**的广泛应用推动了三维测量技术的发展。为了使这类相机能够应用于测量领域,需要解决的关键问题是**相机检校**。相机检校是指确定相机内部几何参数的过程,包括**焦距(focal length)**、**主点(principal point)**以及**畸变系数(distortion coefficients)**等。这些参数对于确保图像数据的准确性和可靠性至关重要。
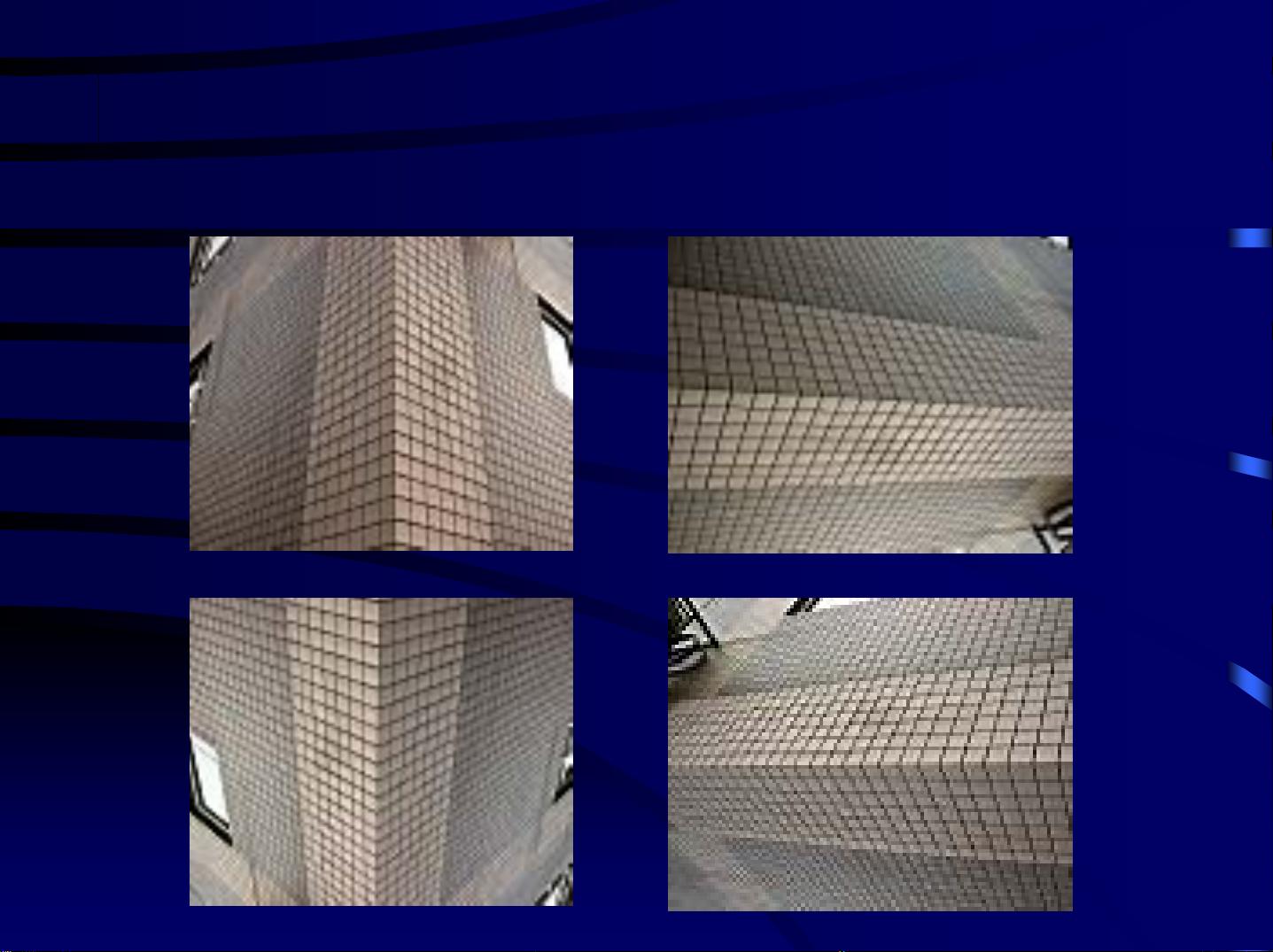
**相机检校方法**通常涉及拍摄一系列带有已知特征的对象(例如建筑物上的窗户)的照片,并通过数学模型来估计相机的内部参数。例如,在本PPT中提到的一个具体案例中,通过对一栋建筑物进行不同角度的拍摄,可以得到相机的焦距为1515.93像素、主点坐标分别为(670.46, 494.57)像素,这些数值与标准值相比非常接近,表明检校过程相当精确。
##### 1.2 摄影全站仪(PTSS)
**摄影全站仪**(Photogrammetric Total Station System, PTSS)是一种集成了**量测数码相机**与**全站仪**的技术设备。其主要组成部分包括:
- **量测数码相机**:通常采用Rollei D30或D7型号的相机。
- **全站仪**:用于测量距离、角度等信息的仪器。
- **机械适配器**:用于连接相机与全站仪的装置。
PTSS的工作原理是通过机械接口将数码相机与全站仪连接起来,形成一个集成系统。该系统涉及到三个坐标系:**地面坐标系**、**全站仪坐标系**以及**摄影机坐标系**。通过这三种坐标系之间的转换,可以建立起相机视场内的目标位置与真实世界坐标之间的关系,从而实现高精度的三维坐标测量。
**共线方程**是摄影测量中的核心数学模型,它描述了空间目标点、像点及摄影机之间的几何关系。PTSS系统中的共线方程基于上述三种坐标系,通过复杂的矩阵运算来计算出目标点的真实坐标。
#### 二、多基线立体匹配
在数字近景摄影测量中,**多基线立体匹配**是一种重要的技术手段,用于提高图像匹配的精度和稳定性。传统的立体匹配通常基于两幅图像之间的对应关系来进行,而多基线立体匹配则考虑了多幅图像的信息,通过比较多个视角下的图像特征来获得更准确的目标定位结果。
#### 三、人体运动跟踪
**人体运动跟踪**是数字近景摄影测量在生物力学、运动科学等领域的重要应用之一。通过设置多个摄像头从不同角度捕捉人体动作,可以精确地分析运动员的动作细节,这对于运动训练和康复治疗等方面具有重要意义。
#### 四、飞机姿态测量
**飞机姿态测量**是利用数字近景摄影测量技术来确定飞行器在空中的姿态变化,这对于飞行器的设计、测试以及飞行控制等方面都是非常关键的信息。通过安装在飞机外部的多个摄像头,可以实时监测并记录飞机的姿态变化情况,进而对飞行状态进行优化调整。
#### 五、数字近景摄影测量与计算机视觉
数字近景摄影测量与**计算机视觉**紧密相关。计算机视觉技术的发展为数字近景摄影测量提供了强大的支持,使得从图像中提取有用信息变得更加高效和准确。例如,通过图像处理算法可以从大量的图像数据中自动识别目标对象,进一步提高了测量的自动化程度和精度。
数字近景摄影测量是一门结合了光学、机械、电子、计算机等多个领域的交叉学科,其在现代科技和工业应用中扮演着越来越重要的角色。通过不断的技术创新和发展,数字近景摄影测量将在更多领域展现出其独特的优势和价值。