步进电机是一种特殊的电机,它能够将接收到的电脉冲信号精确地转化为机械角度的移动,这使得它在需要精确定位和控制速度的系统中广泛应用,例如在PLC(可编程逻辑控制器)的控制系统中。步进电机的转动并非连续的,而是分步骤进行,每次脉冲信号对应一个特定角度的转动,通过调整脉冲频率和数量,可以实现速度和位置的精确调控。
根据其内部构造和工作原理,步进电机主要分为三种类型:永磁式、反应式和混合式。永磁式步进电机通常有两个相位,提供较小的转矩和体积,步距角常见为7.5度或15度。反应式步进电机有三个相位,能提供较大的转矩输出,但噪声和振动较大,步距角通常为1.5度。混合式步进电机结合了前两者的优势,既有良好的转矩性能,又具备较高的定位精度,常见的步距角为1.8度(两相)或0.72度(五相)。
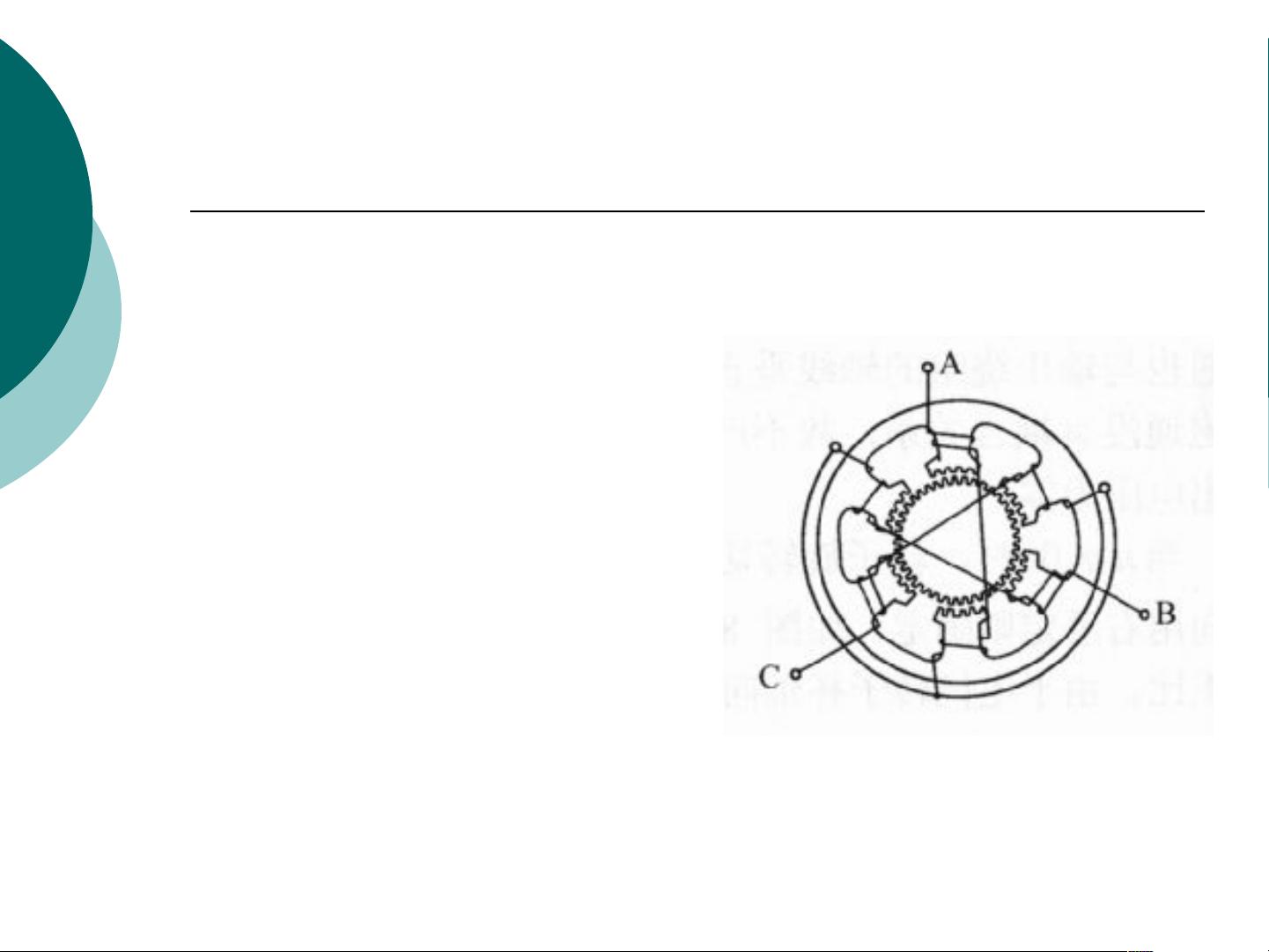
步进电机的结构包括定子和转子,它们通常由硅钢片或其他软磁材料制成,每个磁极上都绕有一对绕组。定子和转子上的小齿相互配合,通过改变绕组的通电顺序和频率,控制电机的转动方向和位置。电机的位置、速度和方向分别由脉冲数、频率和绕组通电顺序决定。
步进电机的一些关键参数包括固有步距角、相数、保持转矩和钳制转矩。固有步距角是电机每接收一个脉冲信号时转动的角度,而电机的相数影响其步距角。保持转矩是在电机未转动时定子对转子的锁定力矩,是衡量电机性能的重要指标。钳制转矩则是指电机在不通电状态下定子对转子的阻力矩,反应式步进电机因转子不含永磁材料,所以没有钳制转矩。
步进电机的特点包括:精度高,通常误差在步进角的3-5%以内;电机温度限制,过高会导致磁性材料退磁;随着转速提高,力矩会下降,因为高频下反向电动势增大,电流减小;低速运行稳定,高速时可能无法启动并伴随啸叫。这些特性使得步进电机在需要精确控制的场合,如数控设备、自动化生产线和精密仪器等,成为理想的驱动元件。在嵌入式系统中,如STM32、ARM等微处理器平台,可以方便地集成步进电机的控制算法,实现复杂的运动控制任务。