
目 录
1 前言........................................................................1
1.1 四旋翼无人机设计的目的、意义及应达到的技术要求..........................1
1.1.1 四旋翼无人机设计的目的及意义........................................1
1.1.2 四旋翼无人机的技术要求..............................................1
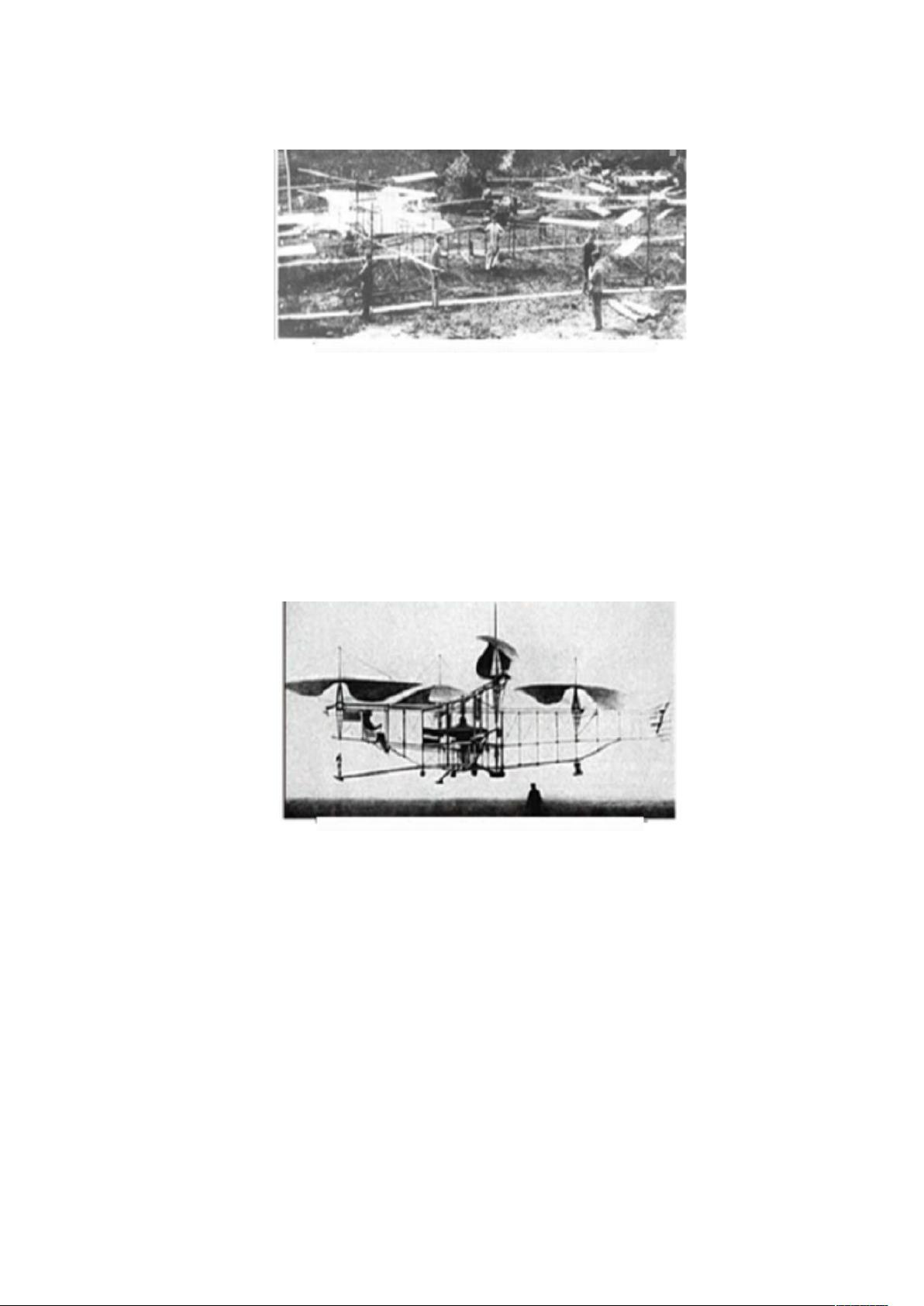
1.2 四旋翼无人机的发展历程概况..............................................1
1.3 四旋翼无人机简介及前景..................................................3
1.4 四旋翼无人机设计应解决的主要问题........................................4
2 四旋翼无人机设计总体思路....................................................5
2.1 软件设计的思路..........................................................5
2.2 方案选择................................................................5
2.3 研究方法................................................................6
3 四旋翼无人机的结构与运动姿态................................................7
3.1 无人机的结构............................................................7
3.2 四旋翼无人机的运动姿态..................................................7
4 飞行控制系统硬件设计........................................................9
4.1 主控制器................................................................9
4.2 传感器模块..............................................................9
4.3 电机驱动...............................................................10
4.4 电源电路...............................................................10
5 软件设计总体思路...........................................................12
5.1 MPU6050 六轴数据获取 ...................................................12
5.1.1 IIC 的使用 ........................................................12
5.1.2 读取 MPU6050 ......................................................12
5.1.3 具体程序解析......................................................12
5.2 卡尔曼滤波............................................................13
5.2.1 滤波的作用.........................................................13
5.2.2 具体程序解析.......................................................14
5.3 无人机姿态描述.........................................................15
5.4 四元数姿态解算.........................................................17
5.5 姿态控制...............................................................19
5.5.1 PID 的简单介绍 .....................................................19
5.5.2 PID 参数整定 .......................................................19
5.5.3 四旋翼无人机的姿态控制.............................................20
5.5.4 PID 调节顺序及具体程序解析 .........................................20
5.6 PWM 控制输出 .............................................................21
5.6.1 PWM 简介 ...........................................................21
5.6.2 PWM 对电机的控制简述 ...............................................22
6 系统调试与飞行测试.........................................................23
7 总结.......................................................................24
参考文献.....................................................................25
谢 辞........................................................................26
附 录........................................................................27

















- 1
- 2
前往页