
WIRELESS COMMUNICATIONS AND MOBILE COMPUTING
Wirel. Commun. Mob. Comput. (2009)
Published online in Wiley InterScience
(www.interscience.wiley.com) DOI: 10.1002/wcm.879
Communication protocols for vehicular ad hoc networks
Arnaud Casteigts
∗,†
, Amiya Nayak
∗
and Ivan Stojmenovic
∗
School of Information Technology and Engineering, University of Ottawa, Canada
Summary
Vehicular networks are envisioned for large scale deployment, and standardization bodies, car manufacturers, and
academic researchers are solving a variety of related challenges. After a brief description of intelligent transportation
system (ITS) architectures and the main already-established low-level standards, this tutorial elaborates on four
particular aspects of vehicular networks, which are (i) the potential for a large set of innovative applications, (ii) a
review of the main modeling approaches used for both roads and traffic, and finally two important communication
primitives, that are (iii) data dissemination via broadcasting/geocasting, and (iv) routing in both highway and urban
environments. A particular emphasis is on recent protocols that realistically consider the inherently complex nature
of vehicular mobility, such as intermittent connectivity, speed variability, and the impact of intersections. Copyright
© 2009 John Wiley & Sons, Ltd.
KEY WORDS: vehicular ad hoc networks; wireless communications; road modeling; traffic modeling; broadcast-
ing; geocasting; routing
1. Introduction
Mobile ad hoc networks are networks that self-
organize over an evolving topology and rely on
multi-hop communication instead of using a fixed
infrastructure. In the past two decades, a plethora of
communication protocols were proposed to target var-
ious specific contexts ranging from robotic networks,
pedestrians networks, low earth orbit satellites, or
military units in a battlefield. Despite a large set of
potential applications in these environments, vehicular
networks are likely to be the very first deployed
large-scale instance of mobile ad hoc networks. The
years to come will witness development of these
networks, as vehicles will start to be equipped with
wireless communication capabilities and able to run
∗
Correspondence to: Arnaud Casteigts, Amiya Nayak or Ivan Stojmenovic, School of Information Technology and Engineering,
University of Ottawa, Canada.
†
E-mail: casteig@site.uottawa.ca; anayak@site.uottawa.ca; ivan@site.uottawa.ca
dedicated protocols to communicate with each other
and with the infrastructure along the roads.
Vehicular networks have the potential to assist in
coping with a continually increasing traffic demand
and accident statistics worldwide. Building new roads
is an expensive way of increasing limited capacity
of existing roads. Hence, the integration of vehicles
as active communication and computation agents of
the road management into Intelligent Transportation
System (ITS) offers unprecedented improvement
opportunities, ranging from selecting routes with
up-to-the-minute information, to giving priority to
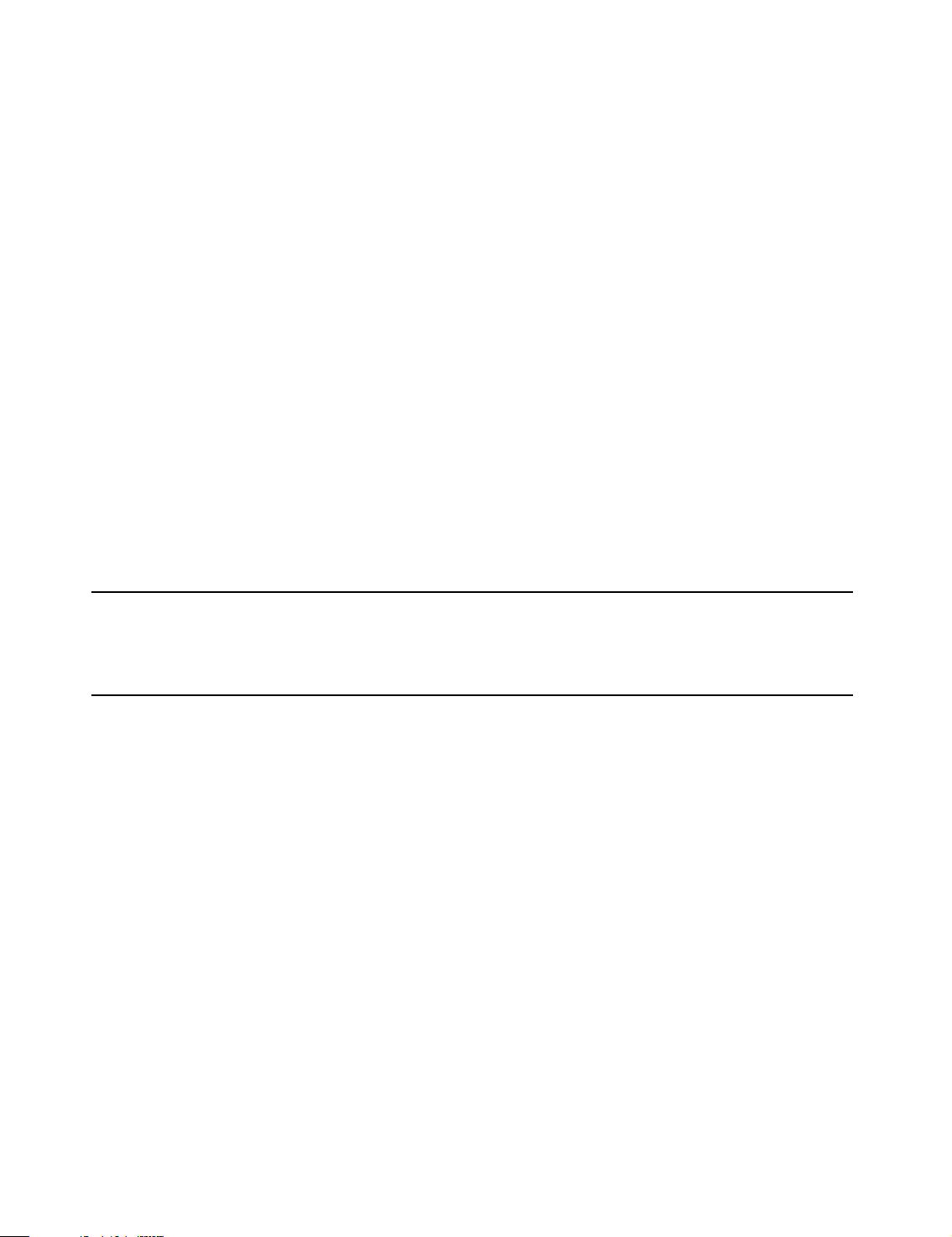
response teams, notifying vehicles and drivers about
road incidents (see Figure 1, where operations 1 and 2
are related to traffic safety, while operation 3 improves
traffic efficiency), delivering contextual services to
Copyright © 2009 John Wiley & Sons, Ltd.
剩余17页未读,继续阅读
资源评论


suijingqi
- 粉丝: 0
- 资源: 4









最新资源
- Labview多列列表框操作框架,JKI+队列状态机,带一些OOP,扩展性强,具体看下图
- 移动机器人动态避障仿真,DWA方法,包含静态障碍物和动态障碍物,实现对障碍物避障的路径规划
- 基于stm32芯片仿真的倒车测距提示系统 包含演示视频 报告 proteus仿真 keil代码 以stm32为最小系统电路进行连接,按钮控制系统开关,使用SRF04采集倒车,LM016L液晶显示屏显示
- 魔术公式轮胎模型,m文件,magic formula 可供参考
- Matlab代码:含热网的综合能源系统(IES)优化运行 风电、光伏、CHP机组(燃气燃煤)、燃气锅炉、火力发电机组,吸收式制冷机、电制冷机、蓄电池,蓄热罐等设备 负荷类型:冷、热、电 优化目标:IE
- 昆仑通泰mcgs触摸屏和台达VFD-M变频器和天正变频器的rtu通讯示例硬件:mcgs触摸屏(没屏电脑也可实现),台达vfd-m变频器
- MATLAB环境下一种基于机器学习(霍特林统计量,高斯混合模型,支持向量机)的工业数据异常检测 算法运行环境为MATLAB R2021B,执行基于机器学习(霍特林统计量,高斯混合模型,支持向量机)的
- 基于自适应滑膜观测器的轮胎力估计,可估计纵向轮胎力和侧向轮胎力,估计的结果比dugoff轮胎模型计算轮胎力的精度更高 基于分布式驱动电动汽车的车辆状态估计,分别采用无迹卡尔曼,容积卡尔曼进行估计,可
- 电钻方案,电扳手方案,低速力矩保持,堵转不停,脉冲注入 IPD初始位置检测,无刷电机控制方案,BLDC控制器,电动工具开发套件 含有脉冲注入检测位置,具备电感法 含有过温保护,过流保护,欠压保护等
- 51单片机开发的8层电梯项目,定时模拟版,包括程序源码和protues仿真,程序源码注释详细,非常适合单片机开发人员
- 威纶通MODBUS控制两台台达变频器通讯程序 ~ 可以通过触摸屏控制变频器正反转,运行停止,还能监视变频器的运行频率,输出频率,输出电压,输出电流以及转速 有做笔记,详细内容见笔记 EB8000
- DAB双有源全桥MATLAB双闭环移相ZVS 高频隔离DC DC变器模型(DAB-双有源全桥),基于MATLAB Simulink建模仿真 电压电流双闭环控制,功率双向流动,ZVS软开关 仿真模型
- carsim-simulink联合仿真,ACC自动巡航跟随 在simulink搭建控制策略,上下层分层控制 包含安全距离模型,逆发动机模型,逆制动模型,制动 驱动策略切模块,cpar文件,simf
- soc基于Matlab Simulink实现了以下功能,搭建了储能系统变模型以及钒液流电池模型,仿真效果较好,系统充放电正常 下图为系统模型图,电池输出电压电流以及SOC波形 1.钒液流电池本体建
- Webots 12自由度四足robot仿真模型 四条独立运动的腿,单腿含有三个自由度,每个自由度包含一个电机和一个电机编码器,可以像舵机一样使用位置控制,也可结合编码器使用力矩 单腿的足端包含一个
- 英威腾GD300驱动板IO板主控板方案资料原理图 英威腾变频器GD300量产方案 程序源码 主控板、驱动板、IO板 原理图 PCB bom 工艺文件,源程序
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


