
yolo-6d
论文地址:https://arxiv.org/abs/1711.08848
1 创新点
(1) 提出一个单阶段、仅需要RGB图像、可同时进行目标检测和6d姿态估计的快速网络,在Titan X GPU上可达到
50fps
(2) 6d姿态估计的做法是在当前姿态下,网络预测3d物体模型边缘构成的8个坐标点和物体中心点一共9个点在2d
图片上的投影坐标,最终使用n点透视PnP算法(Perspective n point)计算出预测6d姿态。
本文思想来源于论文BB8: A Scalable, Accurate, Robust to Partial Occlusion Method for Predicting the 3D
Poses of Challenging Objects without Using Depth,由于使用yolo网络,使其具备非常快的预测速度,同时作者
指出如果使用post-processing,可以实现更高的精度,但是速度会下降到10fps。
2 核心思想
BB8是第一篇将CNN应用于6d姿态估计的论文,效果非常显著,但是其不是一个端到端的算法,分成好几个阶
段,并且和SSD-6D一样,需要pose refinement。基于以上问题,作者采用BB8论文思想,但是网络进行了修改,
在速度提升的同时也提高了精度(速度和精度的提高都是因为yolo,作者本文没有大改进)。
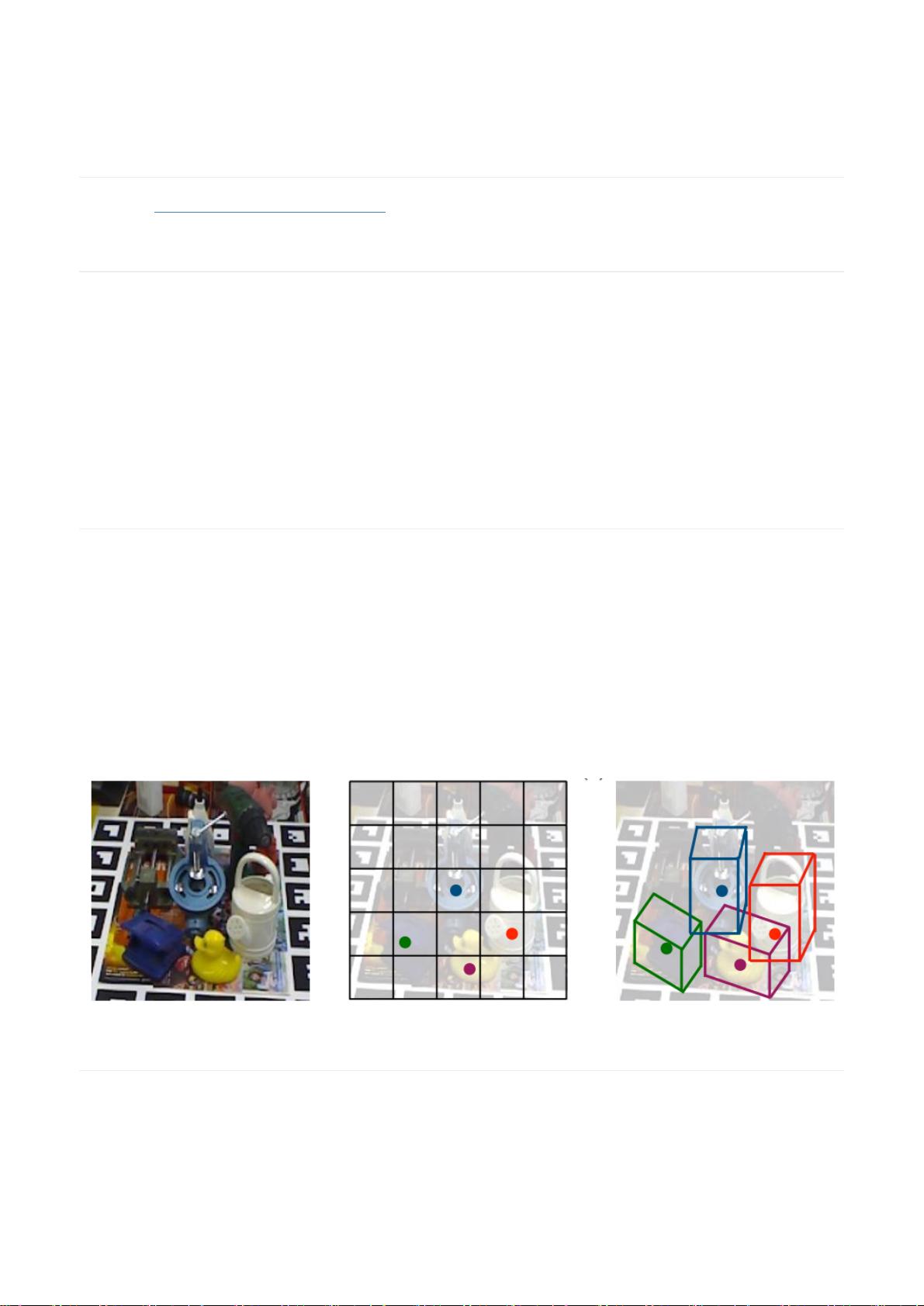
BB8预测6d姿态的核心思想就是不直接预测3d物体表面上点到2d图片的映射点的关系,因为这样复杂度太高,而
是预测3d物体所构成的3d边界框在2d图片上的投影坐标点,如果网络预测得到2d图片投影坐标点后,就可以使用
PnP算法(PnP求解算法是指通过多对3D与2D匹配点,在已知或者未知相机内参的情况下,利用最小化重投影误差来
求解相机外参的算法,PnP求解算法是SLAM前端位姿跟踪部分中常用的算法之一,opencv可以直接调用api)直接得
到3d旋转矩阵和3d平移向量。然而本文采用的是9个点,多预测一个物体中心点(我猜想是因为yolo网络的特点,需
要一个中心点,而不是说有了中心点,重建的3d姿态会更准)。如下图所示:
3 模型
3.1 模型结构
资源评论


帅气的Ezio
- 粉丝: 50
- 资源: 13









最新资源
- LABVIEW程序实例-图片.zip
- LABVIEW程序实例-文件操作.zip
- LABVIEW程序实例-文件操作.zip
- LABVIEW程序实例-图形游标属性.zip
- LABVIEW程序实例-图形游标属性.zip
- LABVIEW程序实例-位置属性控制.zip
- LABVIEW程序实例-位置属性控制.zip
- LABVIEW程序实例-向EXCEL写数据.zip
- LABVIEW程序实例-向EXCEL写数据.zip
- LABVIEW程序实例-循环的数据输入输出.zip
- LABVIEW程序实例-循环的数据输入输出.zip
- LABVIEW程序实例-修改对象.zip
- LABVIEW程序实例-修改对象.zip
- LABVIEW程序实例-液位控制.zip
- LABVIEW程序实例-液位控制.zip
- LABVIEW程序实例-液位全局变量.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


