

Robotics and Autonomous Systems 131 (2020) 103592
Contents lists available at ScienceDirect
Robotics and Autonomous Systems
journal homepage: www.elsevier.com/locate/robot
Vision-based posture-consistent teleoperation of robotic arm using
multi-stage deep neural network
Bin Fang
a,
∗
, Xiao Ma
b
, Jiachun Wang
b
, Fuchun Sun
a
a
Tsinghua National Laboratory for Information Science and Technology, Department of Computer Science and Technology, Tsinghua
University, Beijing 100084, China
b
Institute of Mechanical Engineering, Yanshan University, Qinhuangdao 066004, China
a r t i c l e i n f o
Article history:
Available online 19 June 2020
Keywords:
Visual teleoperation
Deep neural networks
Human–robot posture-consistent mapping
Data generator
a b s t r a c t
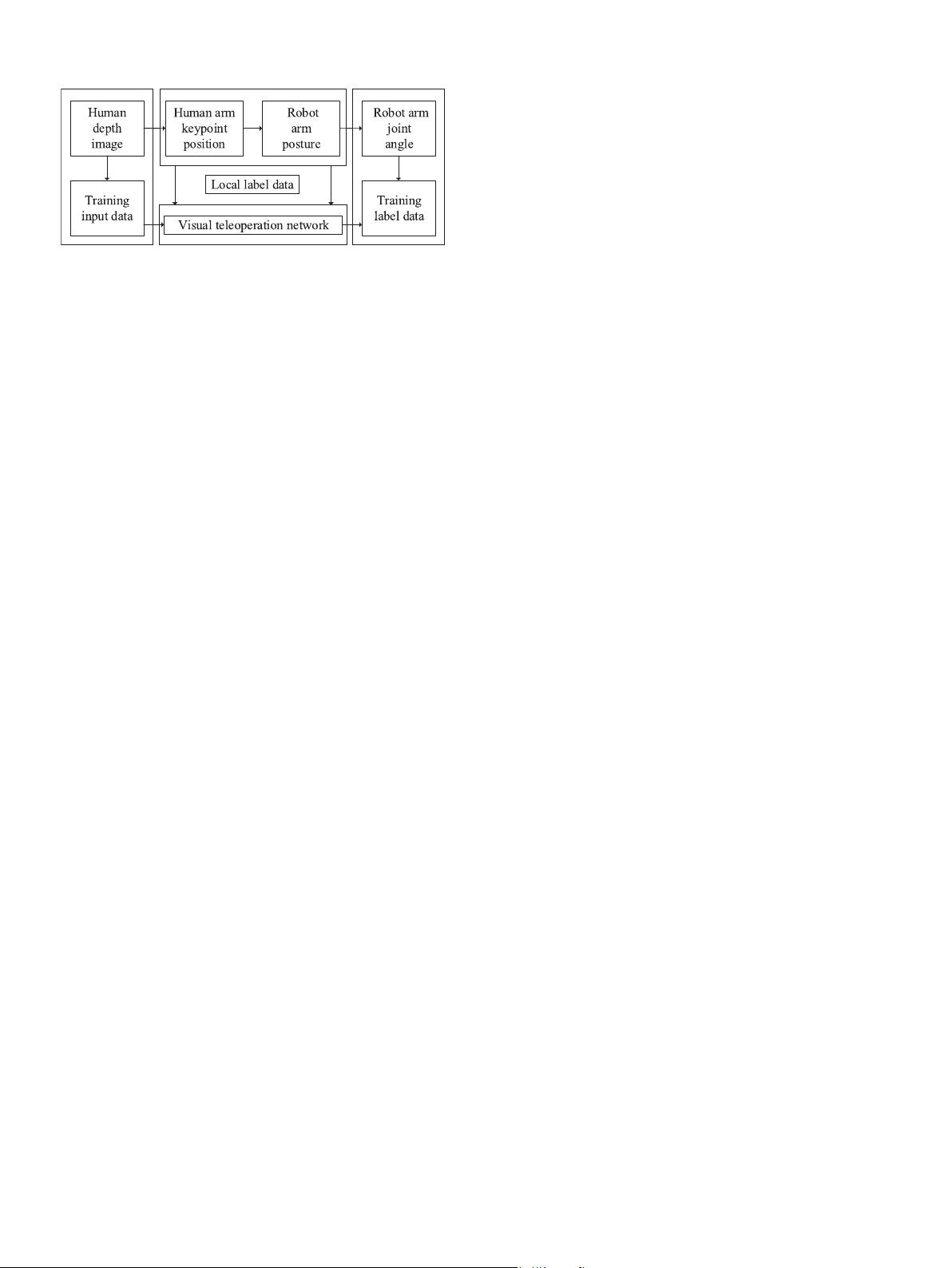
This paper proposes a visual teleoperation with human–robot posture-consistent based on deep neural
network. A multi-stage structure of visual teleoperation network, in which the angles of robotic
joints are obtained from human, is deduced. Furthermore, a novel human–robot posture-consistent
mapping method is developed to generate dataset of the visual teleoperation network by solving
constrained nonlinear matrix functions. Based on the designed framework, the data generator and a
well trained multi-stage visual teleoperation network are presented. Finally teleoperation experiments
are implemented to demonstrate that the proposed method is effectiveness and reliable.
© 2020 Elsevier B.V. All rights reserved.
1. Introduction
With recent rapid advances in robotics, skill learning by
demonstration become more important for robots to finish vari-
ous tasks [1,2]. Through teaching by various demonstration meth-
ods, prior knowledge from human is transferred to robotic sys-
tems, and the robots may perform better in changing environ-
ments [3,4]. Teleoperation demonstration is superior to tradi-
tional programming demonstration because the latter one is
commonly time consuming and not flexible to adapt modern
manufacturing. [5] proposed the method of contacting teleopera-
tion demonstration that is applied for robot learning in dynamic
environment. In [6], the wearable device based on inertial sen-
sors is developed for transferring the interaction skills to the
robot by teleoperation demonstration. In [7], both movement and
stiffness features are learned to robots from human tutors by a
wearable device-based teleoperation. Comparing with contacting
and wearable device-based teleoperation demonstration, the ad-
vantage of visual teleoperation demonstration is showing natural
human-limb motions of human. Through the visual-haptic aid
teleoperation system, the virtual environment observed by depth
camera generates aiding force which helps human to feel real
touching forces and to teleoperate robots [8]. The online brain–
machine interface system based on visual evoked potentials is
developed and it is able to perform visual stimuli classification
∗
Corresponding author.
E-mail addresses: fangbin@mail.tsinghua.edu.cn (B. Fang),
learn0forever@sina.com (X. Ma), wjczth@ysu.edu.cn (J. Wang),
fcsun@mail.tsinghua.edu.cn (F. Sun).
using support vector machines [9]. The visual servoing in teleop-
eration is designed to provide a human operator with the position
information of a remote teleoperation for improving the task
execution [10]. However, visual methods are not limited to assist
in building a teleoperation system which contains rocker and
wearable device. A pose mapping interprets the function of the
task rather than replicating end-point position [11]. Therefore,
it is a very interesting research to design a visual teleoperation
framework which maps the arm posture of human operator to
the robot arm posture directly.
Compared to analytical methods, data-driven techniques
based on deep neural network place more weight on object rep-
resentation and perceptual processing such as pose estimation,
object detection and recognition [12–14]. Effect of convolutional
network depth is investigated in large-scale image recognition
setting [15,16]. In [17], deep convolution neural network methods
are proposed for 3D human pose estimation from monocular
images. A deep convolutional neural network is trained by a
spherical part model for hand pose estimation [18]. Inspired by
the competence of neural network methods in human posture
estimation, an end-to-end deep neural network which receives
the depth image of a human operator arm and outputs the
corresponding joint angles of a robot arm is suitable for visual
teleoperation. An issue of neural network methods direction
mapping from a human depth image to the joint angles of a
robot arm is highly nonlinear, which causes difficulties in a
learning procedure. Therefore, we propose a multi-stage visual
network which contains human body estimation and human–
robot posture-consistent. Besides the structure of the multi-stage
visual teleoperation network, the performance of the multi-stage
https://doi.org/10.1016/j.robot.2020.103592
0921-8890/© 2020 Elsevier B.V. All rights reserved.
剩余7页未读,继续阅读
资源评论


senven0419
- 粉丝: 0
- 资源: 1









最新资源
- 国际象棋检测9-YOLO(v5至v11)、COCO、CreateML、Paligemma、TFRecord、VOC数据集合集.rar
- 2024年秋学季-C#课程的信息系统大作业winform
- 基于Spring Boot+Vue技术的湖南特产销售网站(编号:17755125).zip
- 基于Spring Boot的企业客源关系管理系统的设计与实现(编号:1778968).zip
- 基于spring boot的实验室开放管理系统_4ty8i0c9_203-wx.zip
- 基于Spring Boot的养老院管理系统的设计与实现_6575f5w2_223-wx(1).zip
- 基于Spring Boot的中药材管理系统(编号:25853136).zip
- 基于Spring Boot框架的网上蛋糕销售系统_30z8r428_231-wx.zip
- ZZU 面向对象Java实验报告
- 用python ollama qwen2.5 开发一个AI修仙游戏 MUD
- 基于Spring Cloud技术的智慧云停车场服务管理系统(编号:28065246).zip
- 基于spring mvc和mybatis的食品商城系统(编号:9025459).zip
- NET综合解决工具,windows平台必备
- 基于Spark的电影推荐系统源码(毕设)
- 明厨亮灶老鼠检测数据集:用于YOLO模型训练的高质量数据集
- 商城蛋糕数据库sql源码
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


