System Description
www.ti.com.cn
2
ZHCU257–June 2017
TIDUD93 — http://www-s.ti.com/sc/techlit/TIDUD93
版权 © 2017, Texas Instruments Incorporated
采用
IWR1642
毫米波传感器的
80m
级检测距离的物体检测参考设计
1 System Description
The goal of industrial systems is to increase productivity. Increasingly these systems intelligently interact
with dynamic surroundings and the objects in them. Robots are quickly being deployed as costs are
reduced and functionality is increased to automate mundane and tedious operations. Agriculture,
construction, and heavy vehicles are increasing in intelligence to assist in operator productivity and
enhance the safety towards autonomous operation. Forklifts are rapidly adding intelligence to detect
obstacles, balance loads, and detect ground edges. Drones are disrupting entire industries from package
delivery to forestry. All of these systems require a variety of sensors to detect obstacles in the
environment as well as track object velocities and positions over time.
1.1 Why mmWave Sensors?
mmWave Sensors allow the accurate measurement of distances and relative velocities of obstacles. An
important advantage of mmWave sensors over vision and LIDAR-based sensors are their relatively
immunity to environmental conditions, such as rain, dust, smoke, fog, or frost. Additionally, mmWave
sensors can work in complete darkness or in the glare of direct sunlight. Mounted directly behind
enclosure plastics without external lenses, apertures, or sensor surfaces, the sensors are extremely
rugged. TI's mmWave sensors are also small, lightweight, and produce designs that are three times
smaller and half the weight of miniature LIDAR range finders.
1.2 80-m Range Object Detection TI Design
The TIDEP-0094 is an introductory application configured to detect objects up to a distance of 84 m as
well as estimate their velocities and positions.
The TI Design can be used as a starting point to design a standalone sensor for a variety of Industrial
applications. A range of more than 84 m can be achieved with the design of different chirp parameters,
use of an external lens, or through design of an antenna with higher gain than the one included in the
IWR1642 EVM.
1.3 Key System Specifications
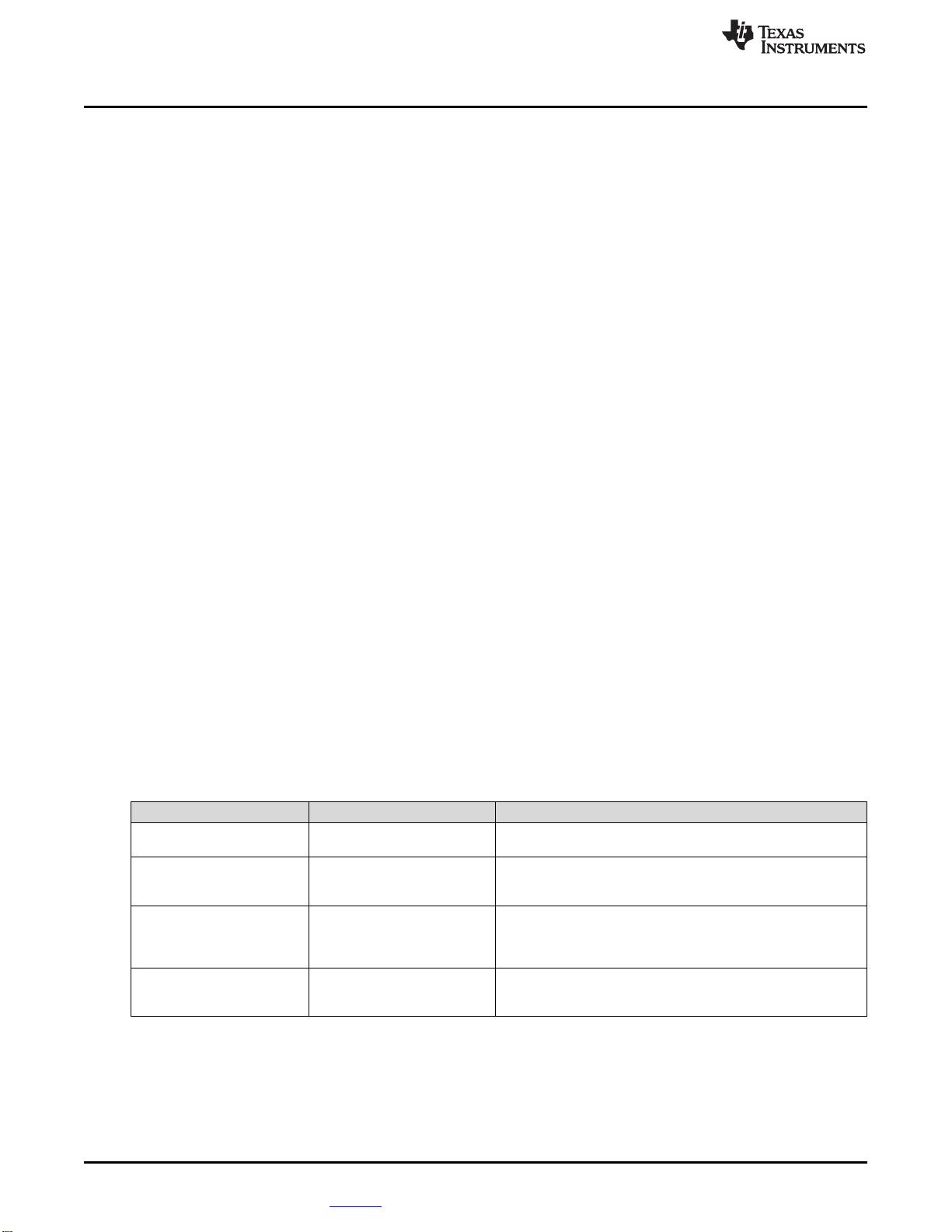
表表 1. Key System Specifications
PARAMETER SPECIFICATIONS DETAILS
Maximum range 84.375 m
This represents the maximum distance that the radar can detect
an object representing an RCS of approximately 10 m².
Range resolution 36.6 cm
Range resolution is the ability of a radar system to distinguish
between two or more targets on the same bearing but at different
ranges.
Maximum velocity 29.33 kph
This is the native maximum velocity obtained using a two-
dimensional FFT on the frame data. This specification will be
improved over time by showing how higher-level algorithms can
extend the maximum measurable velocity beyond this limit.
Velocity resolution 0.46 kph
This parameter represents the capability of the radar sensor to
distinguish between two or more objects at the same range but
moving with different velocities.