青
青
青
青 岛
岛
岛
岛 青
青
青
青 智
智
智
智 仪
仪
仪
仪 器
器
器
器 有
有
有
有 限
限
限
限 公
公
公
公 司
司
司
司
第
II
页
目
目
目
目 录
录
录
录
1
1
1
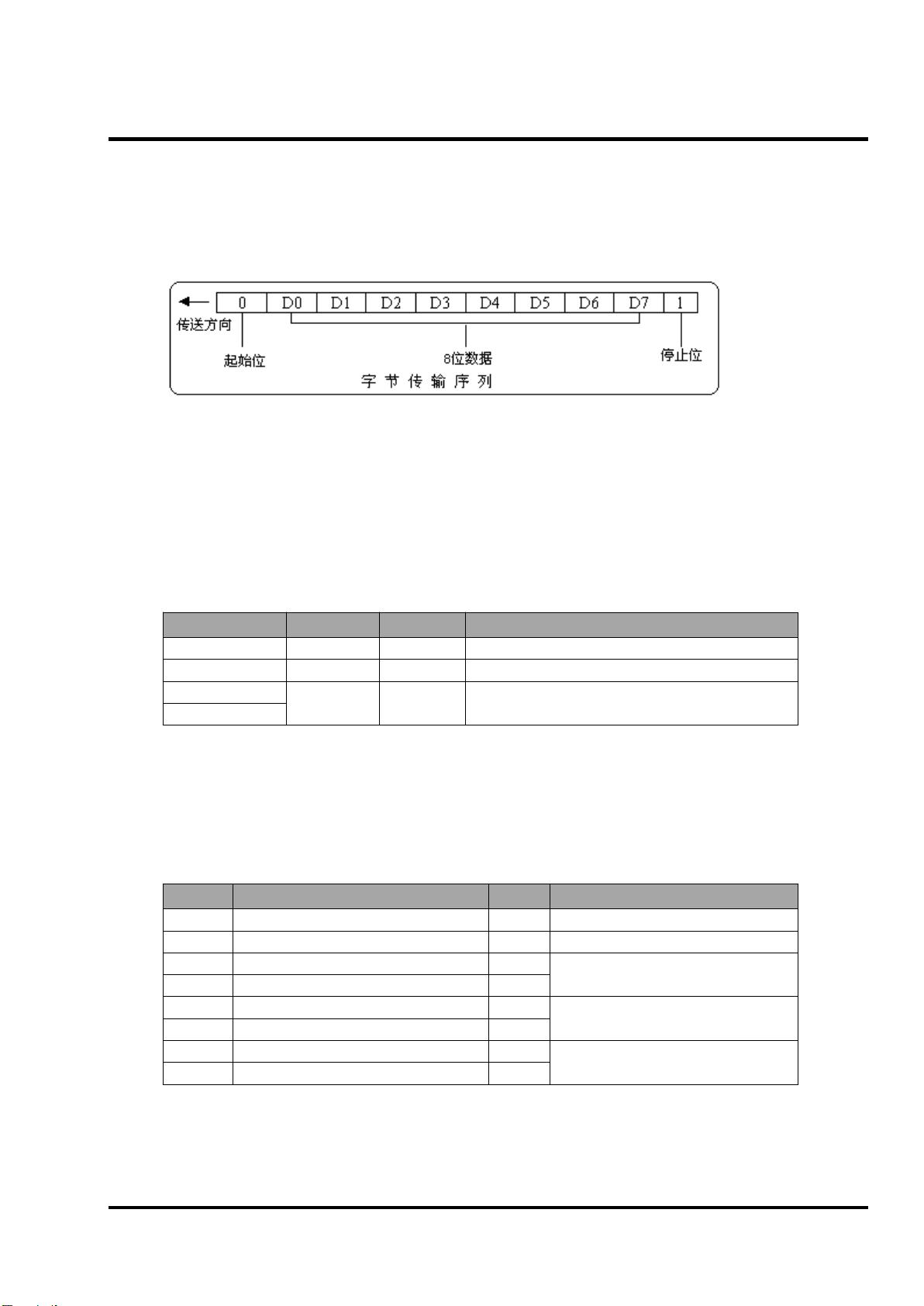
1 、字节格式
、字节格式
、字节格式
、字节格式 …………………………………………………………
…………………………………………………………
…………………………………………………………
………………………………………………………… .
.
.
. 1
1
1
1
2
2
2
2 、
、
、
、
通讯数据格式 ………………………………………………………………
………………………………………………………………
………………………………………………………………
……………………………………………………………… ...
...
...
... 1
1
1
1
3
3
3
3 、帧格式 …………………………………………………………………………
…………………………………………………………………………
…………………………………………………………………………
………………………………………………………………………… 3
3
3
3
4
4
4
4 、通讯波特率 …………………………………………………………………
…………………………………………………………………
…………………………………………………………………
………………………………………………………………… ..
..
..
.. 4
4
4
4
5
5
5
5 、仪表地址 ……………………………………………………………………
……………………………………………………………………
……………………………………………………………………
…………………………………………………………………… .
.
.
. 4
4
4
4
6
6
6
6 、通讯功能码 …………………………………………………………………
…………………………………………………………………
…………………………………………………………………
………………………………………………………………… .
.
.
. 4
4
4
4
7
7
7
7 、通讯数据 CRC
CRC
CRC
CRC 校验 …………………………………………………………
…………………………………………………………
…………………………………………………………
………………………………………………………… 4
4
4
4
8
8
8
8 、仪表数据寄存器地址 ………………………………………………………
………………………………………………………
………………………………………………………
……………………………………………………… ..
..
..
.. 5
5
5
5
附录 A1
A1
A1
A1 : IEEE754
IEEE754
IEEE754
IEEE754 单精度浮点格式: …………………………………………
…………………………………………
…………………………………………
………………………………………… 8
8
8
8
附录 A2
A2
A2
A2 : IEEE754
IEEE754
IEEE754
IEEE754 单精度浮点手工转换样例 …………………………………
…………………………………
…………………………………
………………………………… 10
10
10
10
附录 B
B
B
B : CRC
CRC
CRC
CRC 校验码的计算 —— 计算法 ………………………………………
………………………………………
………………………………………
……………………………………… 12
12
12
12
附录 C
C
C
C : CRC
CRC
CRC
CRC 校验码的计算 —— 查表 法 ………………………………………
………………………………………
………………………………………
……………………………………… 13
13
13
13
附录 D
D
D
D :数据转换例程 …………………………………………………………
…………………………………………………………
…………………………………………………………
………………………………………………………… 15
15
15
15
附录 E
E
E
E :通讯连接线的制作 ……………………………………………………
……………………………………………………
……………………………………………………
…………………………………………………… 18
18
18
18
附录 F
F
F
F :仪表通讯数据样例 ……………………………………………………
……………………………………………………
……………………………………………………
…………………………………………………… 19
19
19
19