最小二乘参数辨识是系统辨识领域中的一种重要方法,用于从系统输入输出数据中估计系统的参数。在本章中,主要介绍了最小二乘法的基本概念和应用,特别是针对线性单输入单输出(SISO)离散系统的辨识。
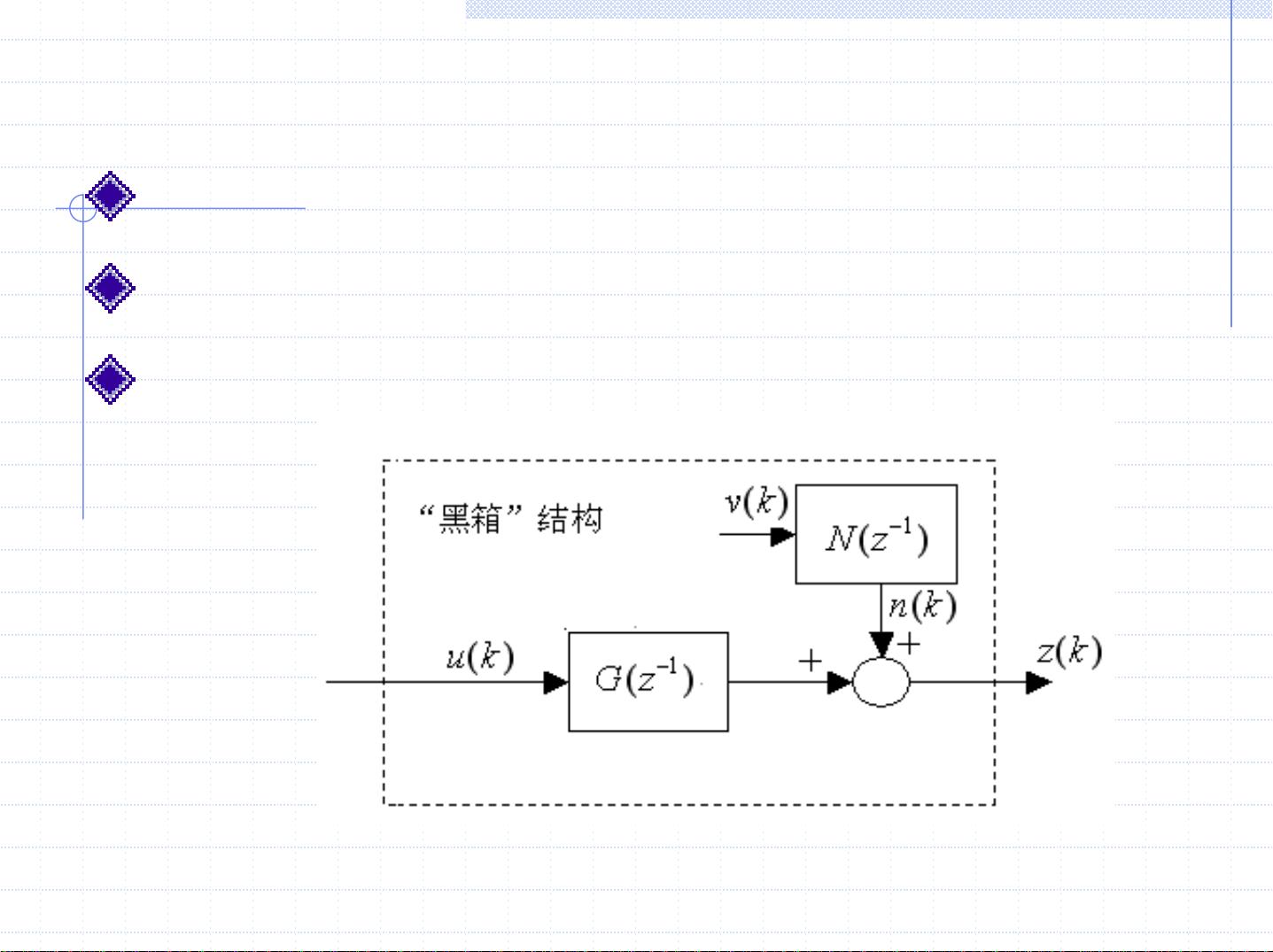
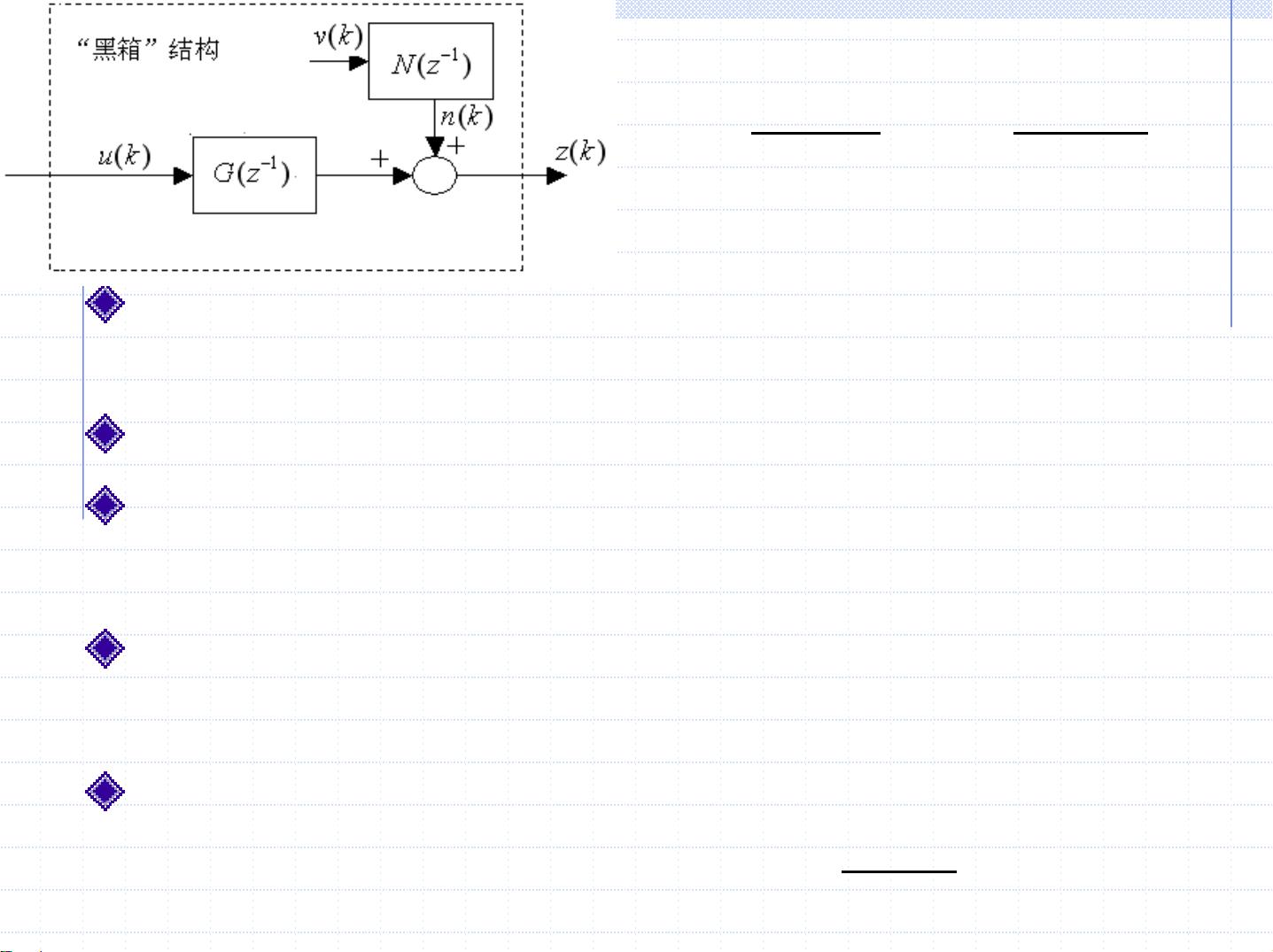
系统模型通常被描述为一系列数学方程,如状态空间模型。对于一个离散系统,可以表示为111()()()B zG zA z−−−=,其中A和B是系统矩阵,z是状态变量,G是传递函数,而z是系统的输入。此外,系统模型还可以写成输出方程1121211212()1()aabbnnnnA za za za zB zb zb zb z−−−−−−−−,其中a和b是系数,n是噪声项。
最小二乘法的核心思想是通过拟合数据来找到最优的模型参数。具体来说,如果系统的输入输出关系可以表示为( )( )( )Tz khkn kθ=+,其中z是输出向量,k是时间步长,h是已知的系统函数,n是随机噪声,θ是待估参数。最小二乘法的目标是找到使得准则函数J(θ)最小的参数值,即( )z k( )h k( )n k{ ( )}z k{ ( )}h k21( )[ ( )( ) ]LTkJz khkθθ==−∑达到最小。这里,J(θ)是对所有数据点误差平方和的求和,θ^ 是最小二乘估计值。
最小二乘参数估计问题的提出是基于时不变的SISO系统,模型形式为11() ( )() ( )( )A zz kB zu kn k−−=+。问题在于如何利用实际的输入输出数据来确定这些模型参数。在进行辨识时,通常会做出一些基本假设,比如模型的阶次已知,噪声具有特定的统计特性,如均值为零、方差为σ²的白噪声序列。
在解决这个问题时,会采用不同的算法,例如经典的一次完成算法,适用于离线辨识,以及现代的递推算法,更适合在线辨识。递推算法可以在新的数据到来时实时更新参数估计,无需重新计算整个数据集。
基本假设和基本关系包括模型阶次的设定,噪声的统计特性(如均值为零,协方差为Σ),以及噪声与输入的不相关性。在推导最小二乘法时,噪声的统计特性并不直接影响计算过程,但在评估估计结果的性质时,这些特性变得至关重要。
最小二乘参数辨识是通过优化误差平方和来估计系统参数的方法,广泛应用于系统辨识和控制理论中。通过对系统输入输出数据的分析,我们可以获得系统的数学模型,进而对系统的行为进行预测和控制。这种方法的效率和准确性取决于数据的质量和选取的模型结构。在实际应用中,还需要结合其他工具和理论,如统计假设检验和滤波理论,来确保参数估计的稳定性和可靠性。













评论0
最新资源