





www.txmcu.com 步进电机原理应用及程序详解 哈尔滨天祥电子
步进电机原理应用及程序详解
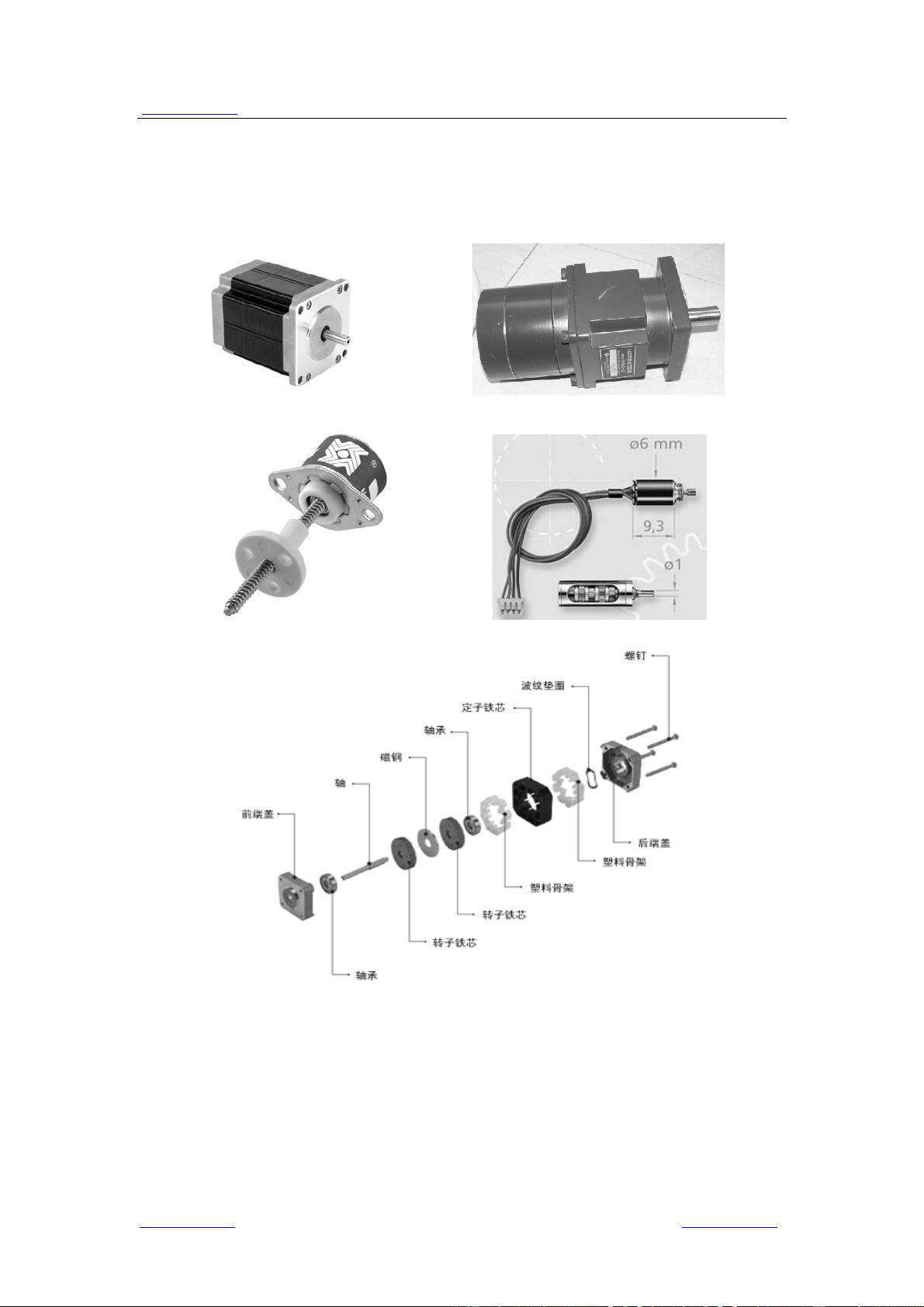
1、步进电机实物图片
图 1 普通步进电机 图 2 减速步进电机
图 3 直线步进电机 图 4 微型步进电机
图 5 步进电机解剖图
2、步进电机介绍
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载
的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受
负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。这一线性
关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。使得在速度、
www.txmcu.com 1 www.txmcu.com

www.txmcu.com 步进电机原理应用及程序详解 哈尔滨天祥电子
www.txmcu.com 2 www.txmcu.com
位置等控制领域用步进电机来控制变的非常的简单。虽然步进电机已被广泛地应
用,但步进电机并不能象普通的直流电机,交流电机在常规下使用。它必须由双
环形脉冲信号、功率驱动电路等组成控制系统方可使用。因此用好步进电机也非
易事,它涉及到机械、电机、电子及计算机等许多专业知识。
3、步进电机分类
z 永磁式(PM)
永磁式步进电机一般为两相,转矩和体积较小,步进角一般为 7.5 度或 15
度。
z 反应式(VR)
反应式步进电机一般为三相,可实现大转矩输出,步进角一般为 1.5 度,但
噪声和振动都很大。在欧美等发达国家 80 年代已被淘汰。
z 混合式(HB)
混合式步进是指混合了永磁式和反应式的优点。它又分为两相和五相:两相
步进角一般为 1.8 度而五相步进角一般为 0.72 度。这种步进电机的应用最为广
泛。
4、技术指标
(1)步进电机的静态指标
z 相数:
是指电机内部的线圈组数,目前常用的有二相、三相、四相、五相步进电机。
电机相数不同,其步距角也不同,一般二相电机的步距角为 0.9°/1.8°、三相的为
0.75°/1.5°、五相的为 0.36°/0.72° 。在没有细分驱动器时,用户主要靠选择不同
相数的步进电机来满足自己步距角的要求。如果使用细分驱动器,则“相数”将
变得没有意义,用户只需在驱动器上改变细分数,就可以改变步距角。
z 步距角:
它表示控制系统每发一个步进脉冲信号,电机所转动的角度。电机出厂时给
出了一个步距角的值,如 86BYG250A 型电机给出的值为 0.9°/1.8°(表示半步工
作时为 0.9°、整步工作时为 1.8°),这个步距角可以称之为“电机固有步距角”,
它不一定是电机实际工作时的真正步距角,真正的步距角和驱动器有关。
z 拍数:
完成一个磁场周期性变化所需脉冲数或导电状态,或指电机转过一个步距角
所需脉冲数,以四相电机为例,有四相四拍运行方式即 AB-BC-CD-DA-AB,四相
八拍运行方式即 A-AB-B-BC-C-CD-D-DA-A。
z 定位转矩:
电机在不通电状态下,电机转子自身的锁定力矩(由磁场齿形的谐波以及机
械误差造成的)。
z 保持转矩:
是指步进电机通电但没有转动时,定子锁住转子的力矩。它是步进电机最重
要的参数之一,通常步进电机在低速时的力矩接近保持转矩。由于步进电机的输
出力矩随速度的增大而不断衰减,输出功率也随速度的增大而变化,所以保持转
矩就成为了衡量步进电机最重要的参数之一。比如,当人们说 2N·m 的步进电
www.txmcu.com 步进电机原理应用及程序详解 哈尔滨天祥电子
机,在没有特殊说明的情况下是指保持转矩为 2N·m 的步进电机。
(2)步进电机的动态指标
z 步距角精度:
步进电机每转过一个步距角的实际值与理论值的误差。用百分比表示:误差
/步距角*100%。不同运行拍数其值不同,四拍运行时应在 5%之内,八拍运行时
应在 15%以内。
z 失步:
电机运转时运转的步数不等于理论上的步数。称之为失步。
z 失调角:
转子齿轴线偏移定子齿轴线的角度,电机运转必存在失调角,由失调角产生
的误差,采用细分驱动是不能解决的。
z 最大空载起动频率:
电机在某种驱动形式、电压及额定电流下,在不加负载的情况下,能够直接
起动的最大频率。
z 最大空载运行频率:
电机在某种驱动形式,电压及额定电流下,电机不带负载的最高转速频率。
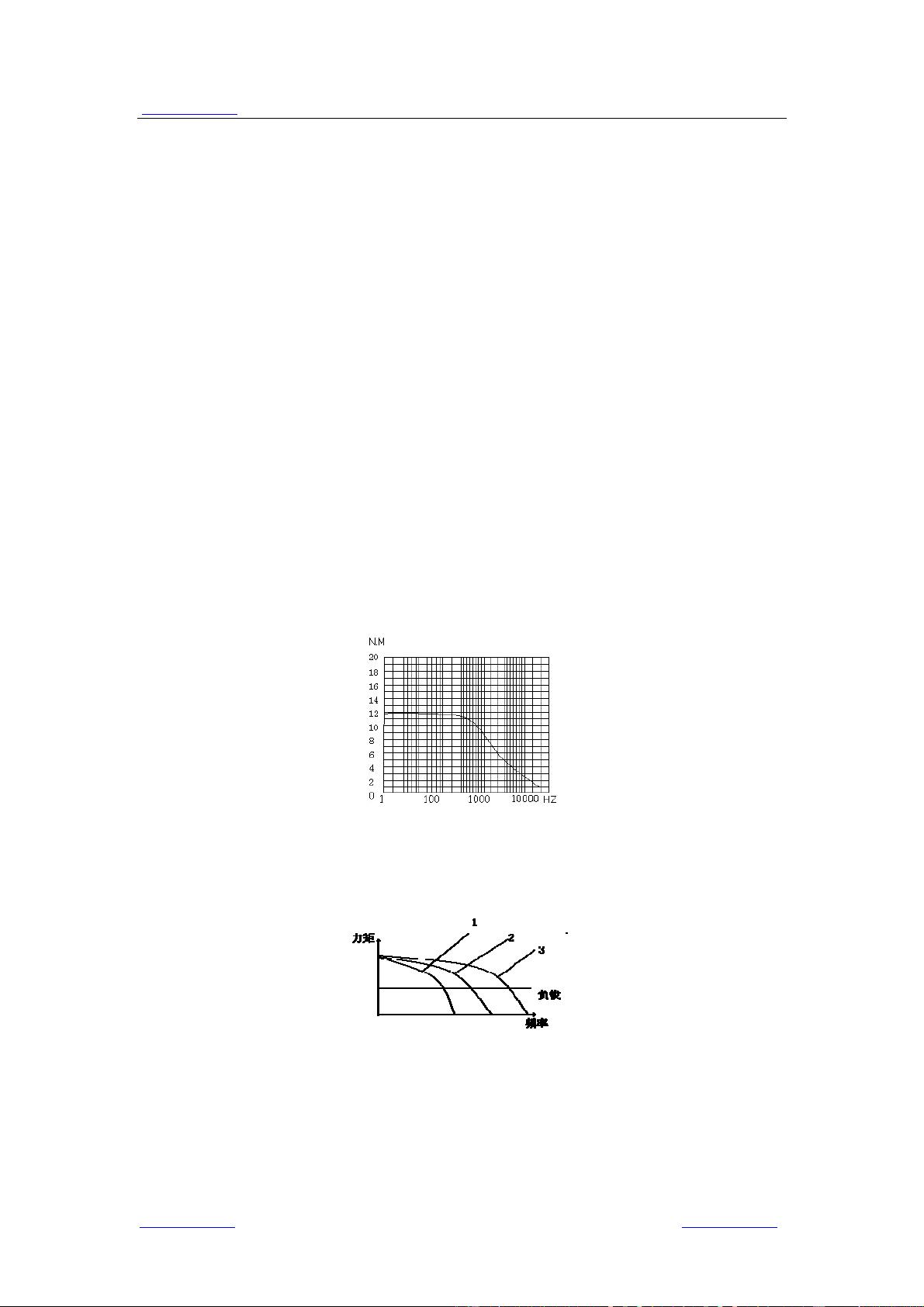
z 运行矩频特性:
电机在某种测试条件下测得运行中输出力矩与频率关系的曲线称为运行矩
频特性,这是电机诸多动态曲线中最重要的,也是电机选择的根本依据。如图 6
所示。
图 6 力矩与频率关系曲线
电机一旦选定,电机的静力矩确定,而动态力矩却不然,电机的动态力矩取
决于电机运行时的平均电流(而非静态电流),平均电流越大,电机输出力矩越
大,即电机的频率特性越硬。如图 7 所示。
图 7 力矩与频率关系曲线
其中,曲线 3 电流最大、或电压最高;曲线 1 电流最小、或电压最低,曲线
与负载的交点为负载的最大速度点。要使平均电流大,尽可能提高驱动电压,或
采用小电感大电流的电机。
z 电机的共振点:
步进电机均有固定的共振区域,步进电机的共振区一般在 50 转/分至 80 转/
www.txmcu.com 3 www.txmcu.com
www.txmcu.com 步进电机原理应用及程序详解 哈尔滨天祥电子
分之间或在 180 转/分左右,电机驱动电压越高,电机电流越大,负载越轻,电
机体积越小,则共振区向上偏移,反之亦然,为使电机输出电矩大,不失步和整
个系统的噪音降低,一般工作点均应偏移共振区较多。因此,在使用步进电机时
应避开此共振区。
5、步进电机工作原理
步进电机是一种将电脉冲转换成相应角位移或线位移的电磁机械装置。它具
有快速启停能力,在电机的负荷不超过它能提供的动态转矩时,可以通过输入脉
冲来控制它在一瞬间启动或停止。步进电机的步距角和转速只和输入的脉冲频率
有关,和环境温度、气压、振动无关,也不受电网电压的波动和负载变化的影响。
因此,步进电机多应用在需要精确定位的场合。
(1)步进电机的工作原理
步进电机有三线式、五线式和六线式,但其控制方式均相同。都要以脉冲信
号电流来驱动。假设每旋转一圈需要 200 个脉冲信号来励磁,可以计算出每个励
磁信号能使步进电机前进 1.8°,其旋转角度与脉冲的个数成正比。步进电动机
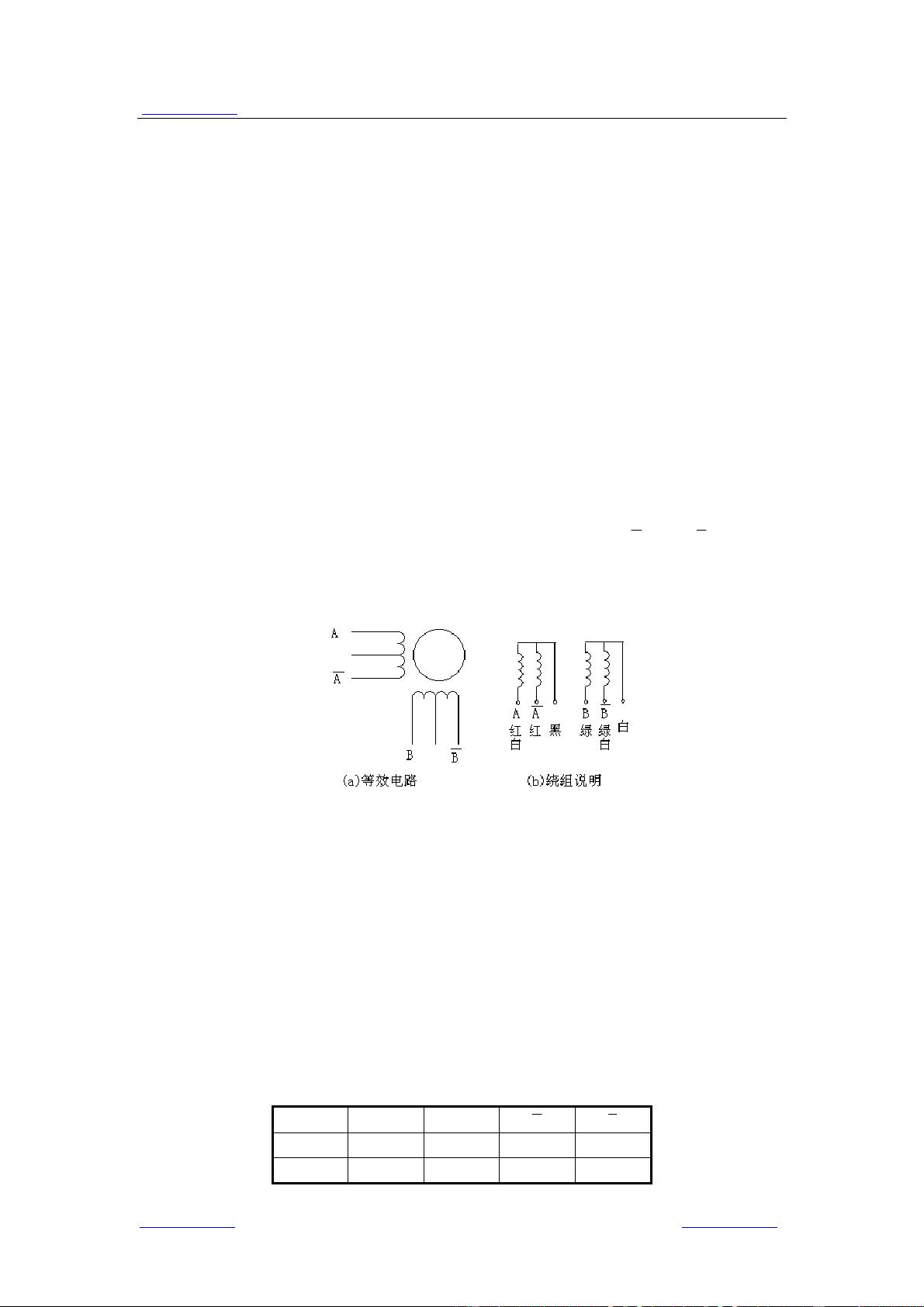
的正、反转由励磁脉冲产生的顺序来控制。六线式四相步进电动机是比较常见的,
它的控制等效电路如图 8 所示。它有 4 条励磁信号引线 A、
A
、B、
B
,通过控
制这 4 条引线上励磁脉冲产生的时刻,即可控制步进电机的转动。每出现一个脉
冲信号,步进电机只走一步。因此,只要依序不断送出脉冲信号,步进电机就能
实现连续转动。
图 8 步进电机的控制等效电路
(2)步进电机的励磁方式
步进电机的励磁方式分为全步励磁和半步励磁两种。其中全步励磁又有 1 相
励磁和 2 相励磁之分;半步励磁又称 1-2 相励磁。假设每旋转一圈需要 200 个脉
冲信号来励磁,可以计算出每个励磁信号能使步进电动机前进 1.8°,简要介绍
如下。
z 1 相励磁:
在每一瞬间,步进电机只有一个线圈导通。每送一个励磁信号,步进电机能
旋转 1.8°,这是 3 种励磁方式中最简单的一种。
其特点是:精确度好、消耗电力小,但输出转矩最小,振动较大。如果以该
方式控制步进电机正转,对应的励磁顺序如表 1 所示。若励磁信号反向传送,则
步进电机反转。表中的1和0表示送给电机的高电平和低电平。
表 1 1 相励磁顺序表
STEP A B
A
B
1 1 0 0 0
2 0 1 0 0
www.txmcu.com 4 www.txmcu.com













