
2.2 机械臂运动学分析
在机械臂运动控制中,通常遵循以下步骤:
(1)路径规划(Path Planning):确定机械臂从起始点到目标点之间的最
优路径。路径规划可以考虑环境中的障碍物,避免碰撞,并优化一些性能指标如
运动时间、能耗等。路径规划的结果是一个离散的路径,由一系列路径点组成。
(2)轨迹规划(Trajectory Planning):将路径规划得到的离散路径点进
行插值,生成平滑的连续轨迹。轨迹规划通常考虑机械臂的动力学约束、运动平
滑性和精确性等因素。插值算法可以是多项式插值、样条插值等,以保证机械臂
在运动过程中的平滑性和连续性。
(3)运动学反解(Inverse Kinematics):根据轨迹规划得到的连续轨迹,
进行运动学反解,求解机械臂各个关节的运动角度。运动学反解是根据机械臂的
几何结构和运动学模型,通过数学方法计算出使得机械臂末端达到目标点的关节
角度。
可以实现机械臂从起始点到目标点的运动控制。路径规划和轨迹规划主要考
虑运动的路径和平滑性,而运动学反解则是将目标点转化为关节角度,以实现机
械臂的准确运动。这些步骤通常在机械臂控制系统中的规划和执行模块中进行。
因为不同的机械臂运动学反解的过程和结果不一样,针对本文使用的机械臂,
下面进行 D-H 建模和运动学分析。
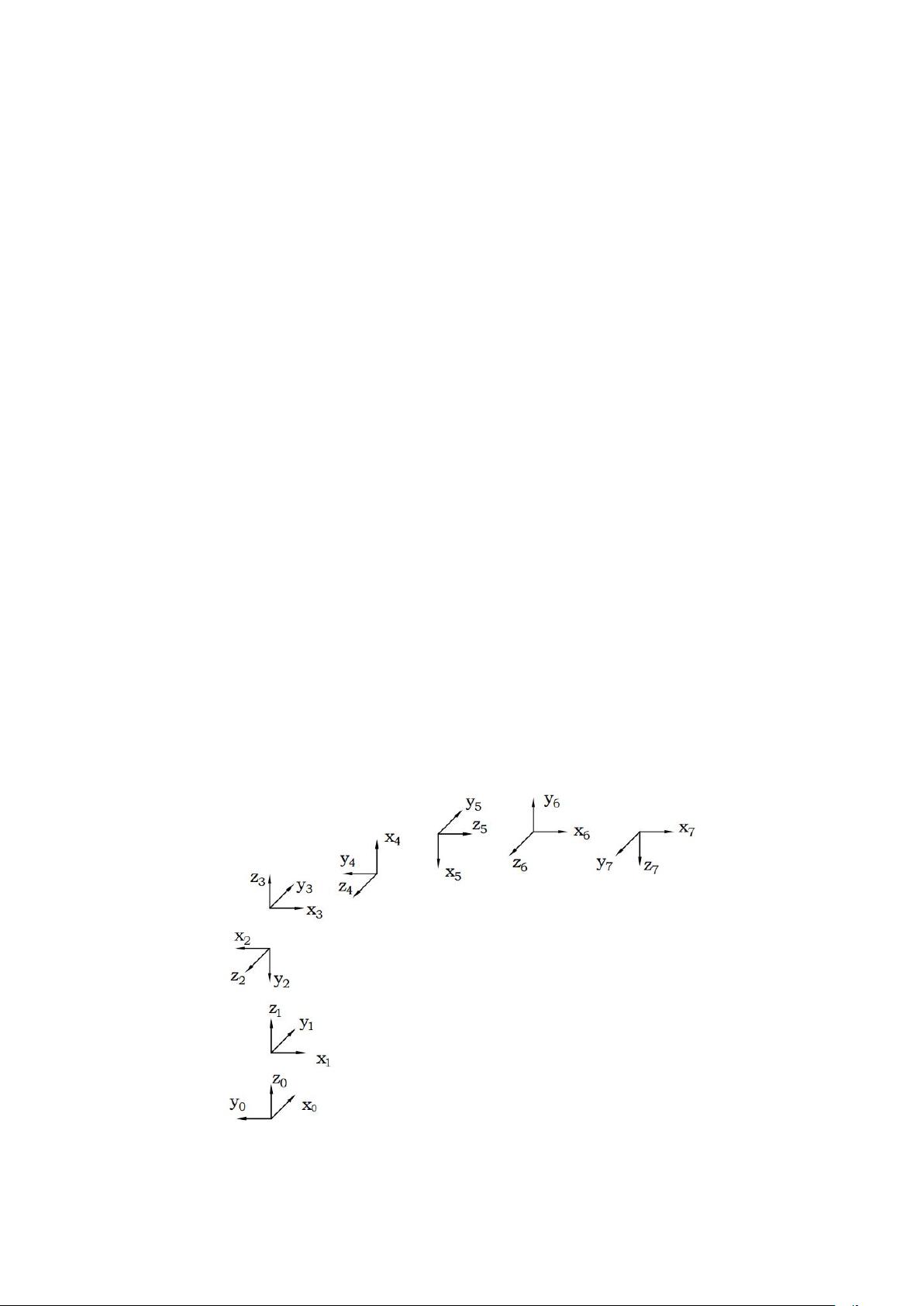
采用改进的 D-H 法建立 Xarm 机械臂连杆坐标系,如图 2-2 所示。相邻连杆
之间的转换矩阵通过
、
、
以及
四个参数来表示,D-H 参数如表 2-1 所
示。
图 2-2 机械臂的改进 D-H 连杆坐标系
Figure 2-2 Improved D-H link coordinate system of manipulator
剩余8页未读,继续阅读
资源评论


anthony-36
- 粉丝: 2435
- 资源: 2









最新资源
- 毕设和企业适用springboot企业数据监控平台类及食品配送管理平台源码+论文+视频.zip
- 毕设和企业适用springboot企业数据监控平台类及文化旅游信息平台源码+论文+视频.zip
- 毕设和企业适用springboot企业数据监控平台类及物联网监控平台源码+论文+视频.zip
- 毕设和企业适用springboot企业数据监控平台类及数据管理平台源码+论文+视频.zip
- 毕设和企业适用springboot企业数据监控平台类及物流管理平台源码+论文+视频.zip
- 毕设和企业适用springboot企业数据监控平台类及线上图书馆源码+论文+视频.zip
- 毕设和企业适用springboot企业数据监控平台类及虚拟现实体验平台源码+论文+视频.zip
- 毕设和企业适用springboot企业数据监控平台类及音频处理平台源码+论文+视频.zip
- 毕设和企业适用springboot企业数据监控平台类及在线系统源码+论文+视频.zip
- 毕设和企业适用springboot企业数据监控平台类及员工管理平台源码+论文+视频.zip
- 毕设和企业适用springboot企业数据智能分析平台类及广告分析平台源码+论文+视频.zip
- 毕设和企业适用springboot企业数据监控平台类及智慧交通调度平台源码+论文+视频.zip
- 毕设和企业适用springboot企业数据智能分析平台类及仓库管理平台源码+论文+视频.zip
- 毕设和企业适用springboot企业数据智能分析平台类及家庭健康管理平台源码+论文+视频.zip
- 毕设和企业适用springboot企业数据智能分析平台类及交通运输管理平台源码+论文+视频.zip
- 毕设和企业适用springboot企业数据智能分析平台类及机器人控制平台源码+论文+视频.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


