
配置 8:ABB 机器人 RobotWare6 新建系统
配置 8:ABB 机器人 RobotWare6 新建系统
RobotWare6 新建系统
ABB 工业机器人的系统是 RobotWare.由于机器人控制器的功能
选项和本体特性不同,所以每台机器人的系统都是独一无二的。如果更
换新的机器人 SD 卡(该 SD 卡购买自 ABB 工业机器人备件,有底层文件,
非普通 SD 卡),可以通过备份给机器人安装一个与原来一模一样的系统。
有时机器人需要在工作时间在老系统中生产,在非工作时间进行新项目
的调试。为了不影响原有系统生产,可以在 SD 卡上再安装一个机器人
系统,在新系统中进行新项目的测试。
(1)在 PC 上安装 RobotStudio6 软件(免费功能即可)
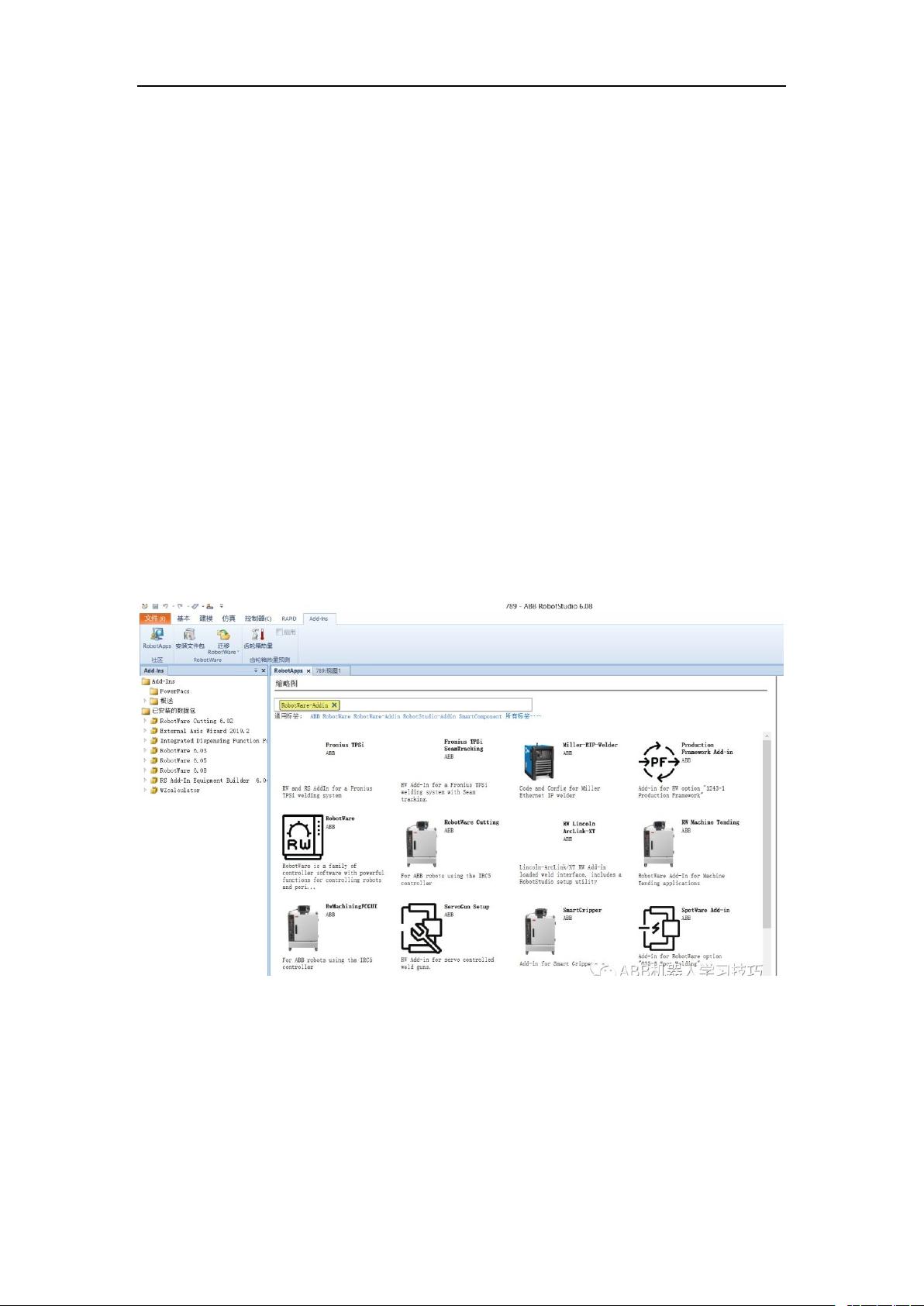
(2)在 PC 上安装有与机器人相同版本的 RobotWare,可以在 PC 连
网 的 情 况 下 , 通 RobotStudio 的 Add-Ins 界 面 可 以 获 取 所 有
RobotWare 版本。
(3)通过示教器或者 RobotStudio 对本台机器人进行备份
(4)通过网线连接 PC 与机器人的外接服务端口。其 IP 地址为
192168.125.1,故 PC 的 IP 地址为自动获取或者 192.168.125.X 网段.
资源评论


是空空呀
- 粉丝: 199
- 资源: 3万+









最新资源
- sumlink储能辅助火电机组二次调频控制策略及容量优化配置 仿真文件含储能sumlink仿真
- Matlab_高度比较的时间序列分析.zip
- Matlab_干涉合成孔径雷达 相关Some work I did during my graduate studie.zip
- Matlab_根据系统要求配置FMCW波形,然后定义目标的距离和速度,并模拟其位移。在相同的仿真环路过程中,计算发射和.zip
- Matlab_高效透明的深度学习在数百行代码.zip
- Matlab_各种点云工具的Matlab.zip
- Matlab_光谱参数化的Matlab包装器.zip
- Matlab_共享OPUSPALA文章和LOTUS软件的脚本和功能,所有功能都可以在其所有者同意的情况下使用.zip
- Matlab_工具箱,用于在基因组尺度模型中包含酶约束.zip
- Matlab_光学镊子工具箱版本1.zip
- Matlab_广义SEIR流行病模型的拟合与计算.zip
- VR项目脚本-Canvas悬浮-适用于UI界面
- Matlab_光谱固有正交分解的Matlab.zip
- Matlab_横向各向同性多孔介质水力压裂的Matlab有限元程序包.zip
- Matlab_核自适应滤波的Matlab基准测试工具箱.zip
- Matlab_红外物理学报,2019,高被引论文MatLab.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


