
单片机多机通信课程设计
1 设计任务
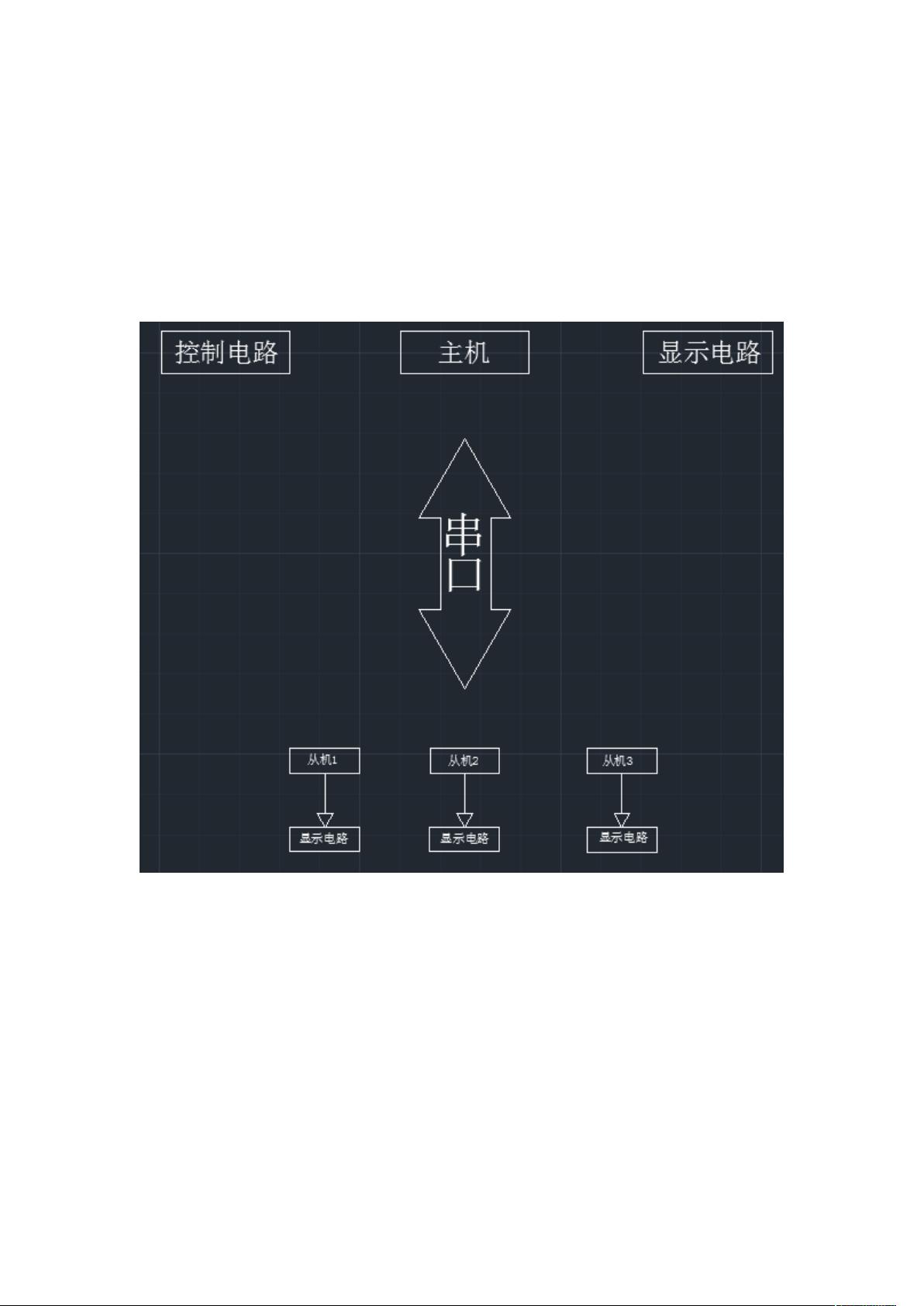
多机串行通信的设计基本任务
1.设计三个以上单片机实现主从式串行通信的系统,主机发送数据到指定站号的从机端,
也可以群发到所有从机端,并在 LED 数码管上显示。
2.可通过接在主机上的键盘输入数据,通过主机发送到从机。
3.从机也可输入数据,并可在查询到主机空闲时将数据发送给主机。
4*.从机间可相互通信(从机—)主机另一从机),通信协议遵从 modbus 规范。
4
@
. 其他功能(创新部分)
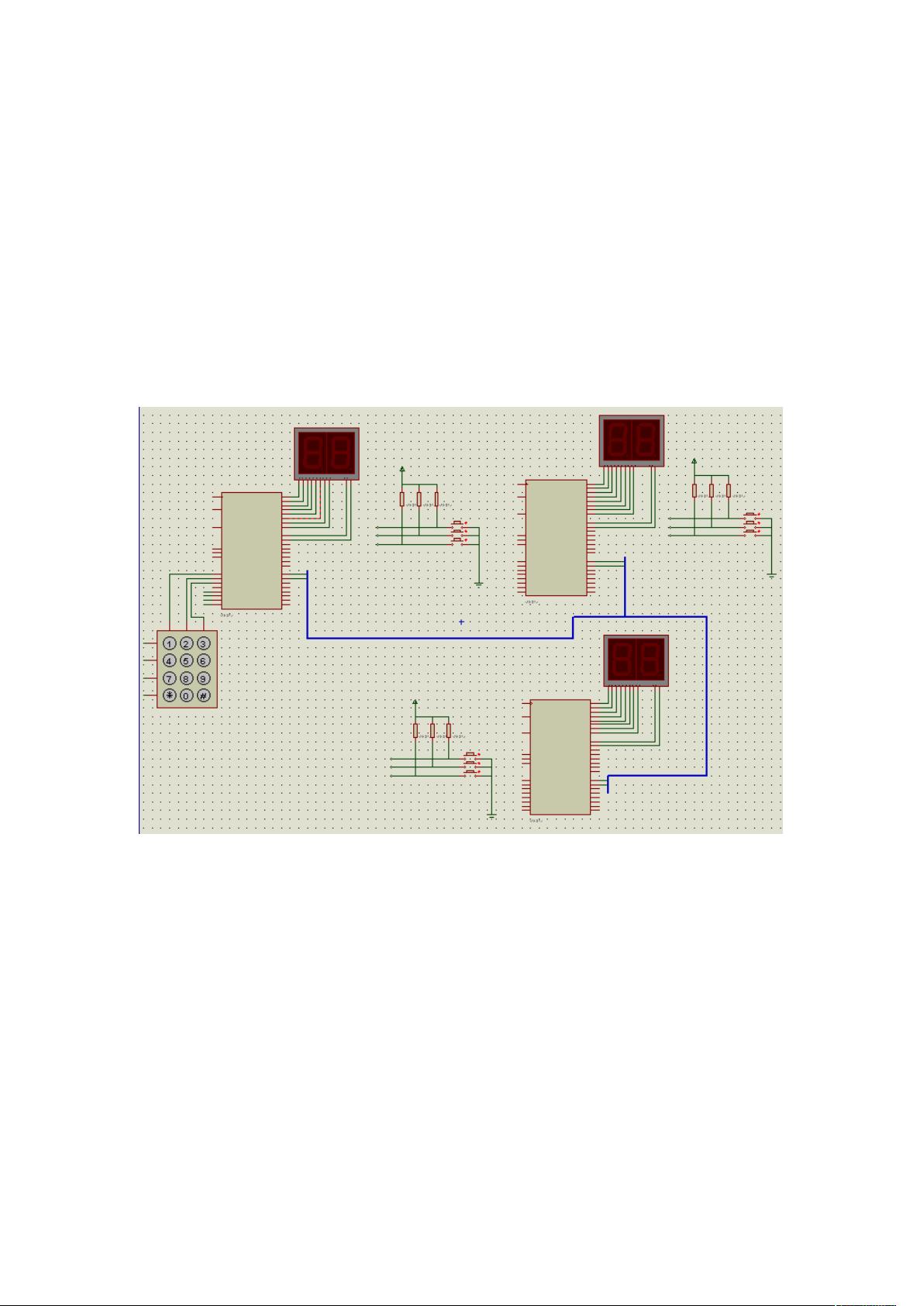
仿真模块例
2 设计方案
2.1 设计任务
本 文 在 参 考 了 现 在 普 遍 的 多 机通信系统的基础上,设计了一种基于 51 单 片 机
STC89C51 的多机通信系统。在 proteus 上设计并仿真电路图。进入 proteus 程序仿真,启动
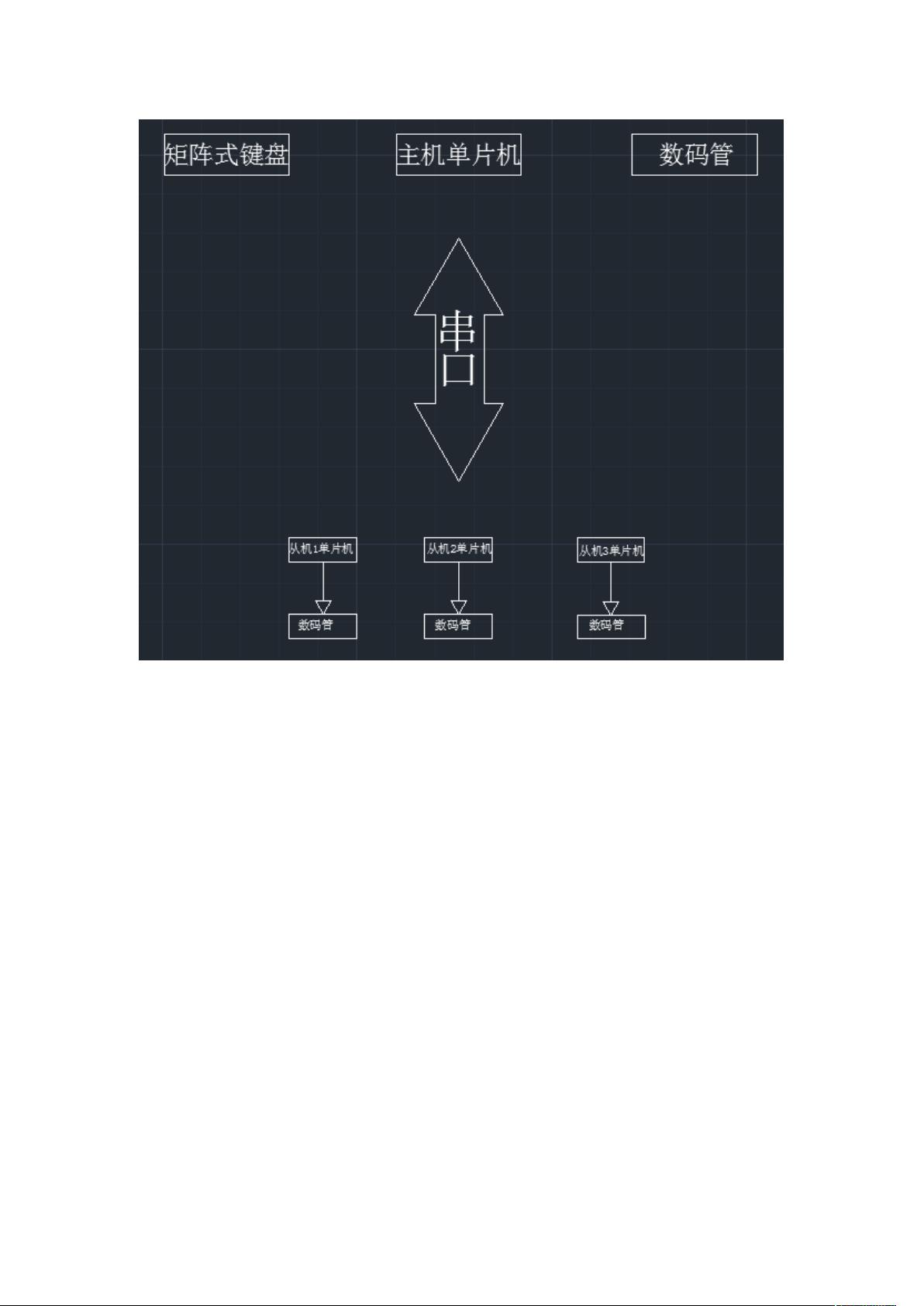
程序系统,首先主机通过按键选择准备通信的从机,接通后,主机通过矩阵键盘上的数字按
键与从机通信,使从机上的数码管显示对应的数字,以此实现多机通信。如,与 2 号机通信
并传输“8”这个数字。首先主机从选择从机按键上按“2 号机”键,与 2 号机连通后按下
主机矩阵键盘上的“8”键,对应的 2 号机数码管上会显示数字“8”,证明通信成功。

剩余20页未读,继续阅读
资源评论

 m0_697922322023-12-18总算找到了想要的资源,搞定遇到的大问题,赞赞赞!
m0_697922322023-12-18总算找到了想要的资源,搞定遇到的大问题,赞赞赞! 糖吃了鱼吗?2023-06-12发现一个宝藏资源,赶紧冲冲冲!支持大佬~
糖吃了鱼吗?2023-06-12发现一个宝藏资源,赶紧冲冲冲!支持大佬~- 2301_818515122023-12-24感谢大佬分享的资源,对我启发很大,给了我新的灵感。
- 2301_774852052023-12-10果断支持这个资源,资源解决了当前遇到的问题,给了新的灵感,感谢分享~
- xinghua_57011982023-12-22资源中能够借鉴的内容很多,值得学习的地方也很多,大家一起进步!

是空空呀
- 粉丝: 198
- 资源: 3万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


