
基本操作 基本操作
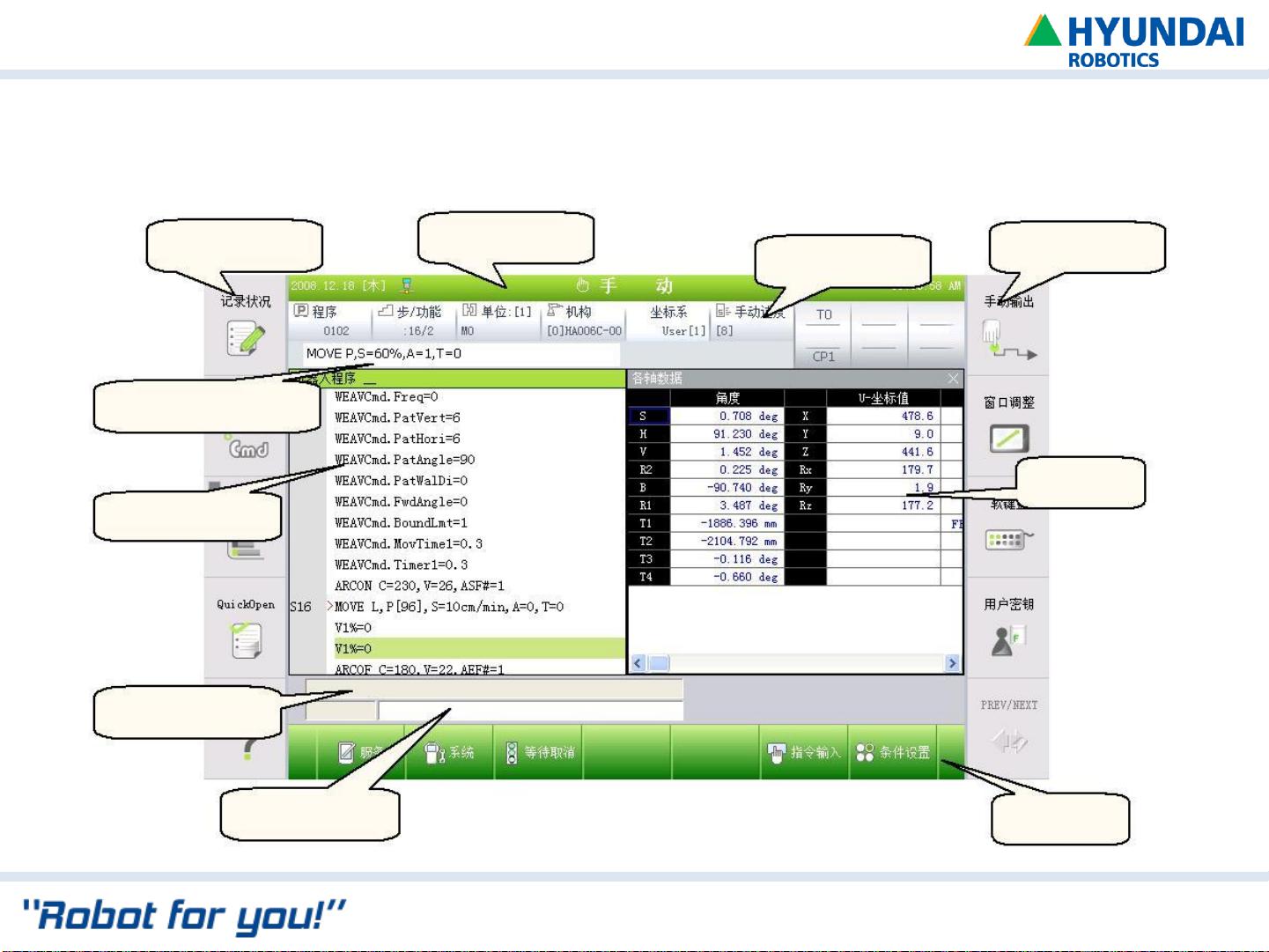
2 示教器的外观 – 正面
》 示教器(TP510)通过以太网与控制器内的主板(BD510)进行通信,可以让用户执行很多功能,如下所示
• 监控:工作程序/每个轴的数据/输入、输出信号/机器人状态等等
• 历史管理:系统版本、操作时间、错误历史记录、停止历史记录等等
• 文件管理:版本&工作程序&参数文件的上传/下载
• 设定各种参数:用户环境/控制/机器人/应用/自动整数等等
• 机器人示教:JOG&工作程序注册
• 机器人操作:电机开启/启动/停止/手自动模式设定
示教器电缆(标配:7.5米)
手提带
<HARTING接口>
以太网
急停开关
手自动钥匙开关
马达上电
半自动启动
停止
挂钩
示教器屏幕
• 触屏
• 7”彩色LCD
• (800×480)
• Windows CE
示教器按键
3




















- 1
- 2
前往页