YAMAHA机器人控制器.pdf
版权申诉
25 浏览量
2022-06-30
14:47:26
上传
评论
收藏 9.85MB PDF 举报

030
Controllers
产品系列 / 选型指南
控制器
1
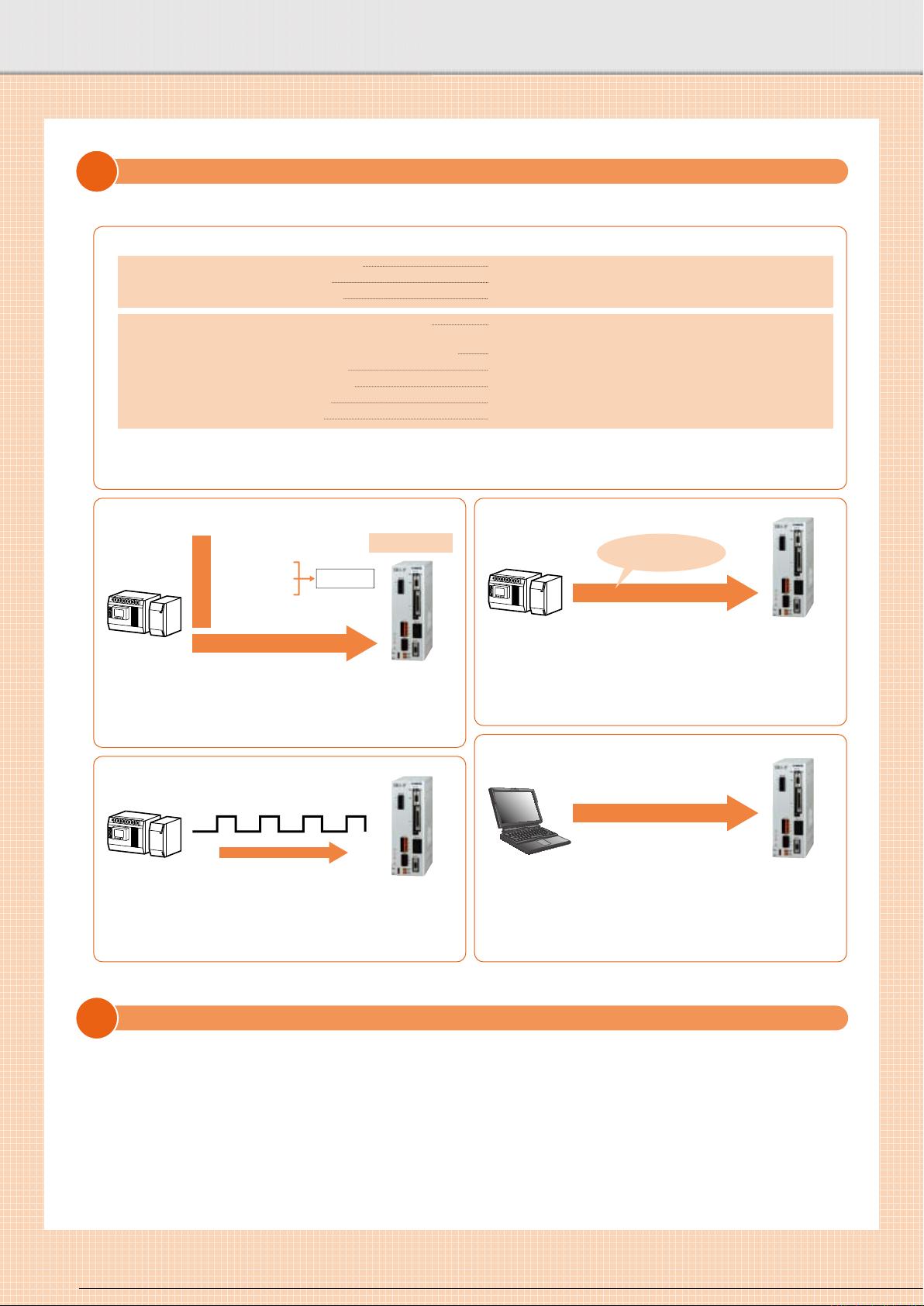
简单、最佳的设置
参数设定简单
机器人控制器是雅马哈机器人的专用设计。对机器人动作所需的增益等伺服参数已预设最佳值。无需繁琐的设定和控制方面的知识、
经验,立即可以动作。
加减速度设定简单
加减速度是左右机械寿命的重要系数。设定过高的加速度会缩短机械寿命,过低则不能发挥马达效率,延长产距时间。雅马哈机器人
控制器按机型、负载重量等细致规定了加减速度。只需设定搬运重量参数,即可自动设定考虑了机械寿命和马达功率的最佳加减速度。
这是只有对机器人无所不知的雅马哈才有的贴心设计。
而且水平多关节机器人还配置了区域控制功能,可以根据机械手臂状态,并考虑惯性变化因素,发挥最大性能。
(注 :脉冲列输入时,加减速度也需要由用户设定。)
雅马哈控制器的特点
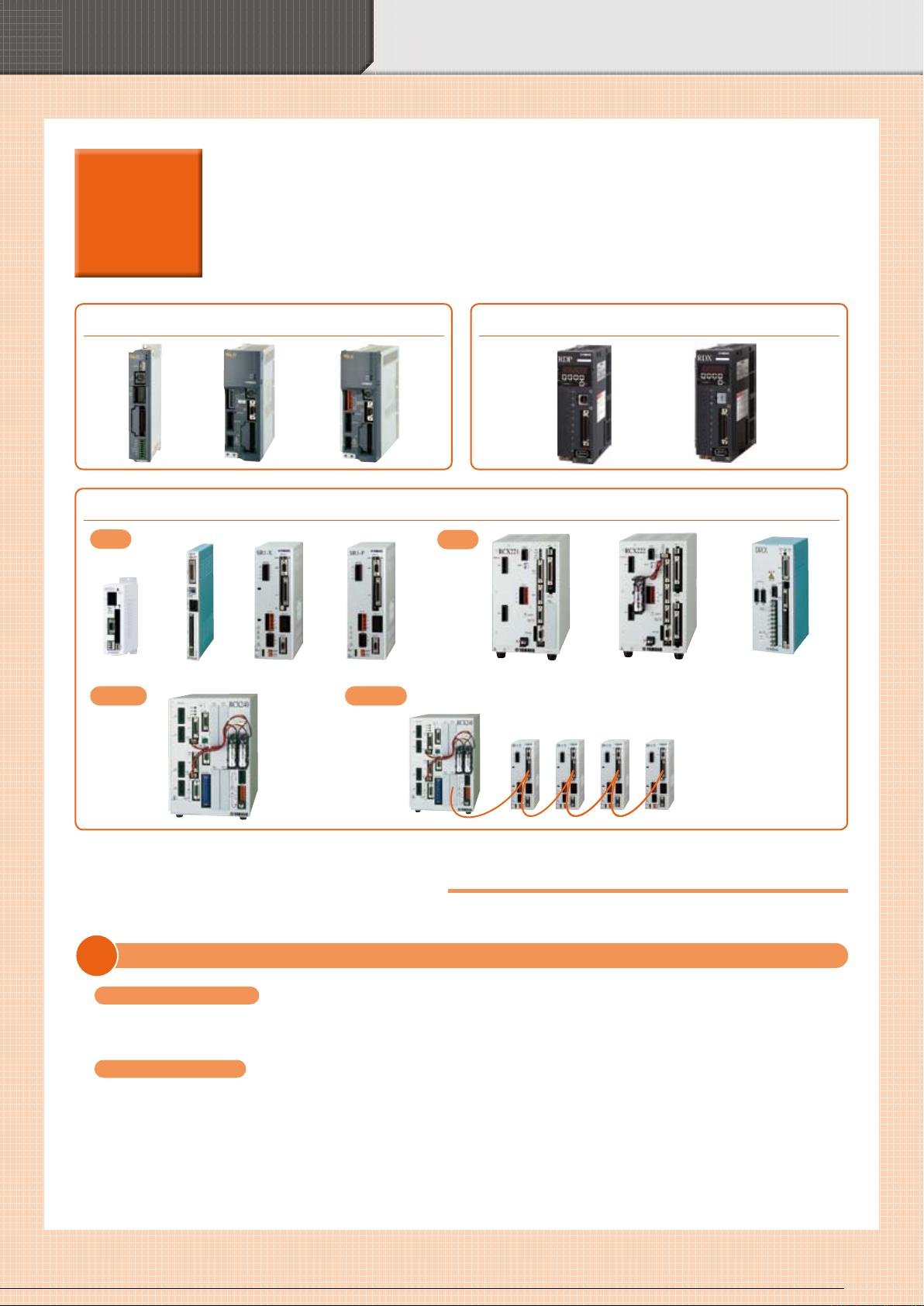
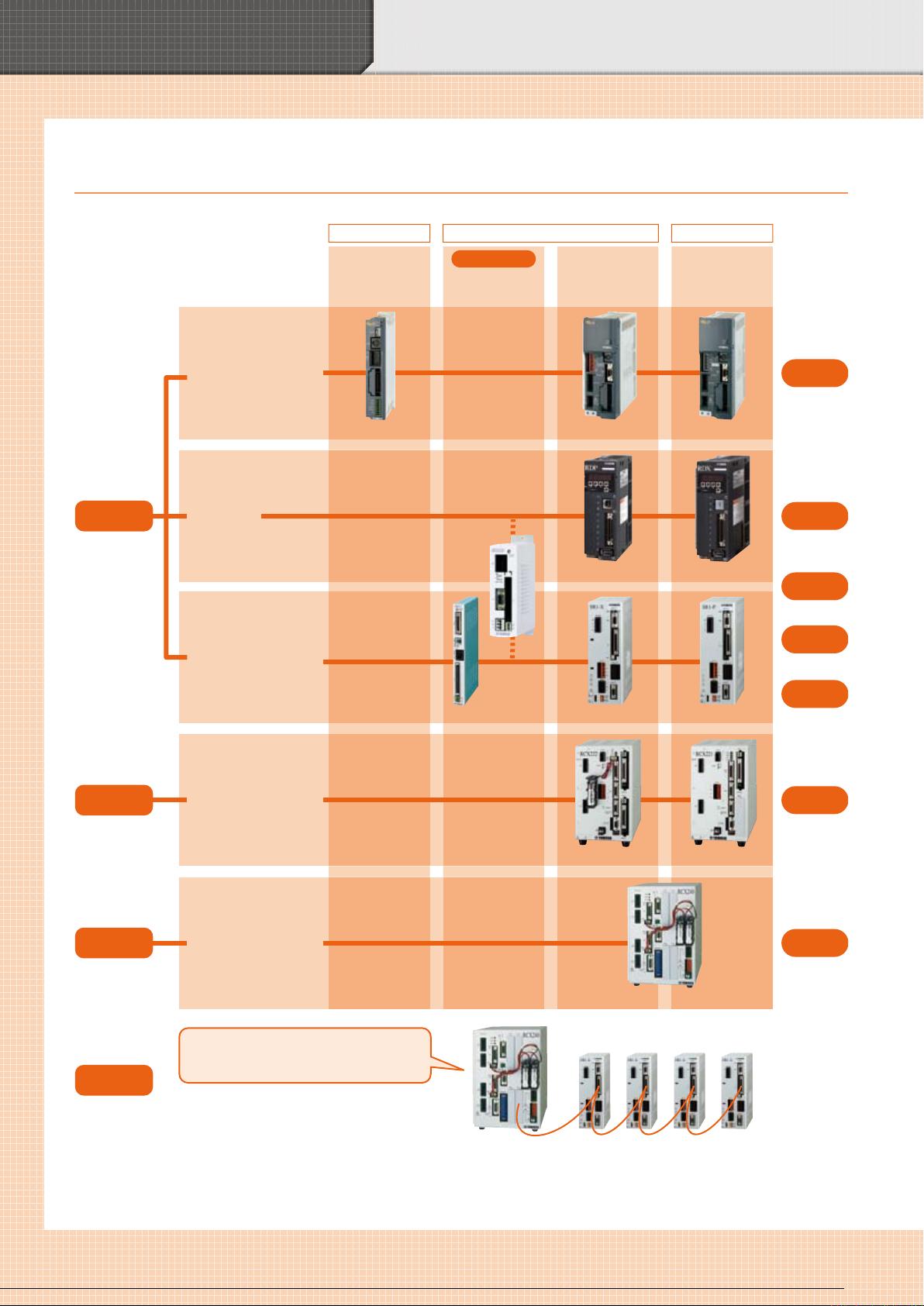
机器人定位控制器
机器人驱动器
机器人控制器
TS-S
ERCX
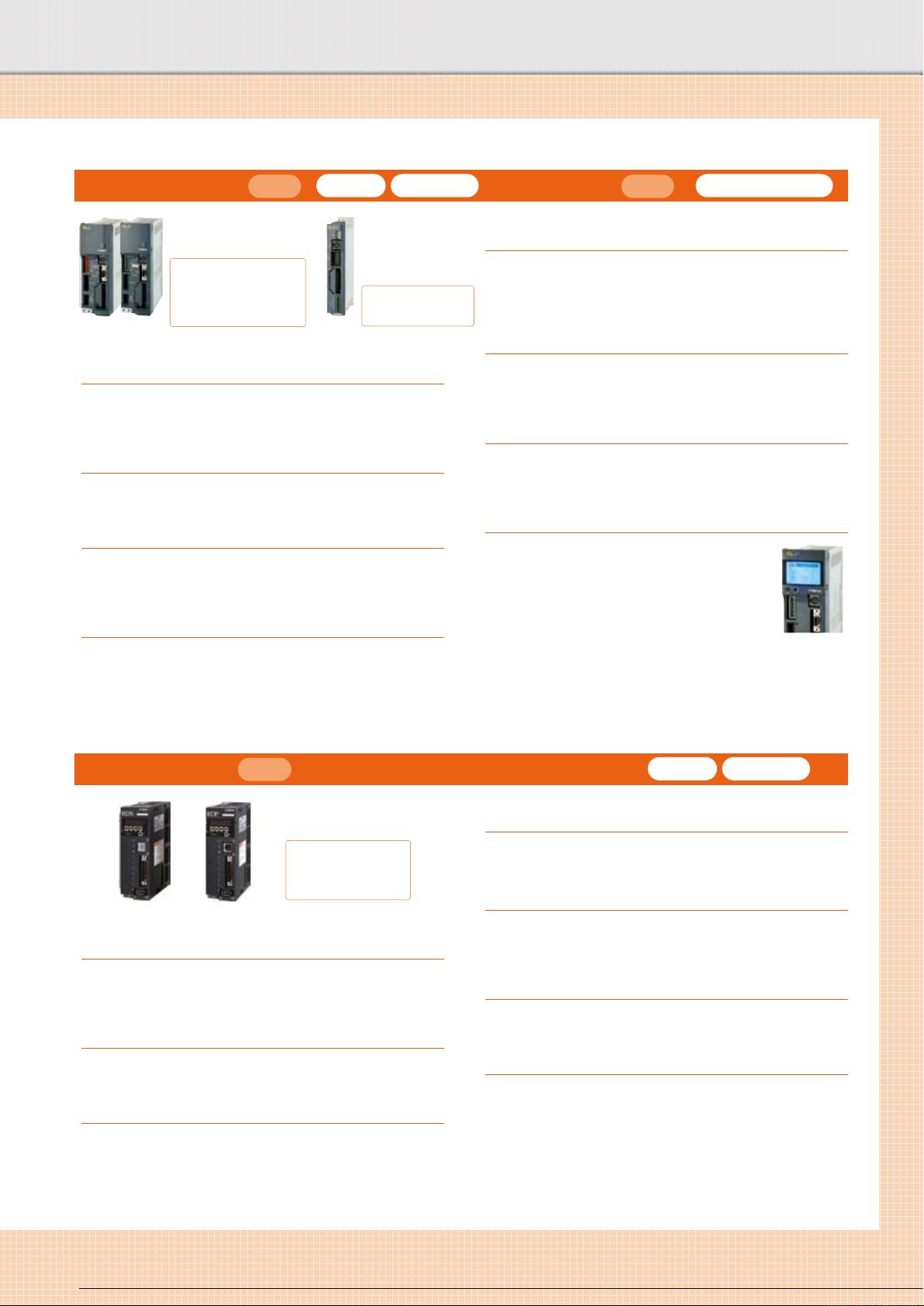
RCX221
RCX240/RCX240S
RCX222
DRCX
ERCD
SR1-PSR1-X
RDP RDXTS-P TS-X
轴
轴
轴 轴
通过
YC-LINK
,在
4
轴控制器上连接
1
轴控制器
1 2
3
、
4
5
~
8
剩余75页未读,继续阅读
资源评论


是空空呀
- 粉丝: 168
- 资源: 3万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP











