KISS-ICP: In Defense of Point-to-Point ICP –Simple, Accurate,
需积分: 1 133 浏览量
2024-03-28
17:14:10
上传
评论
收藏 2.19MB PDF 举报

IEEE ROBOTICS AND AUTOMATION LETTERS. PREPRINT VERSION. ACCEPTED DECEMBER, 2022. 1
KISS-ICP: In Defense of Point-to-Point ICP –
Simple, Accurate, and Robust Registration
If Done the Right Way
Ignacio Vizzo Tiziano Guadagnino Benedikt Mersch Louis Wiesmann Jens Behley Cyrill Stachniss
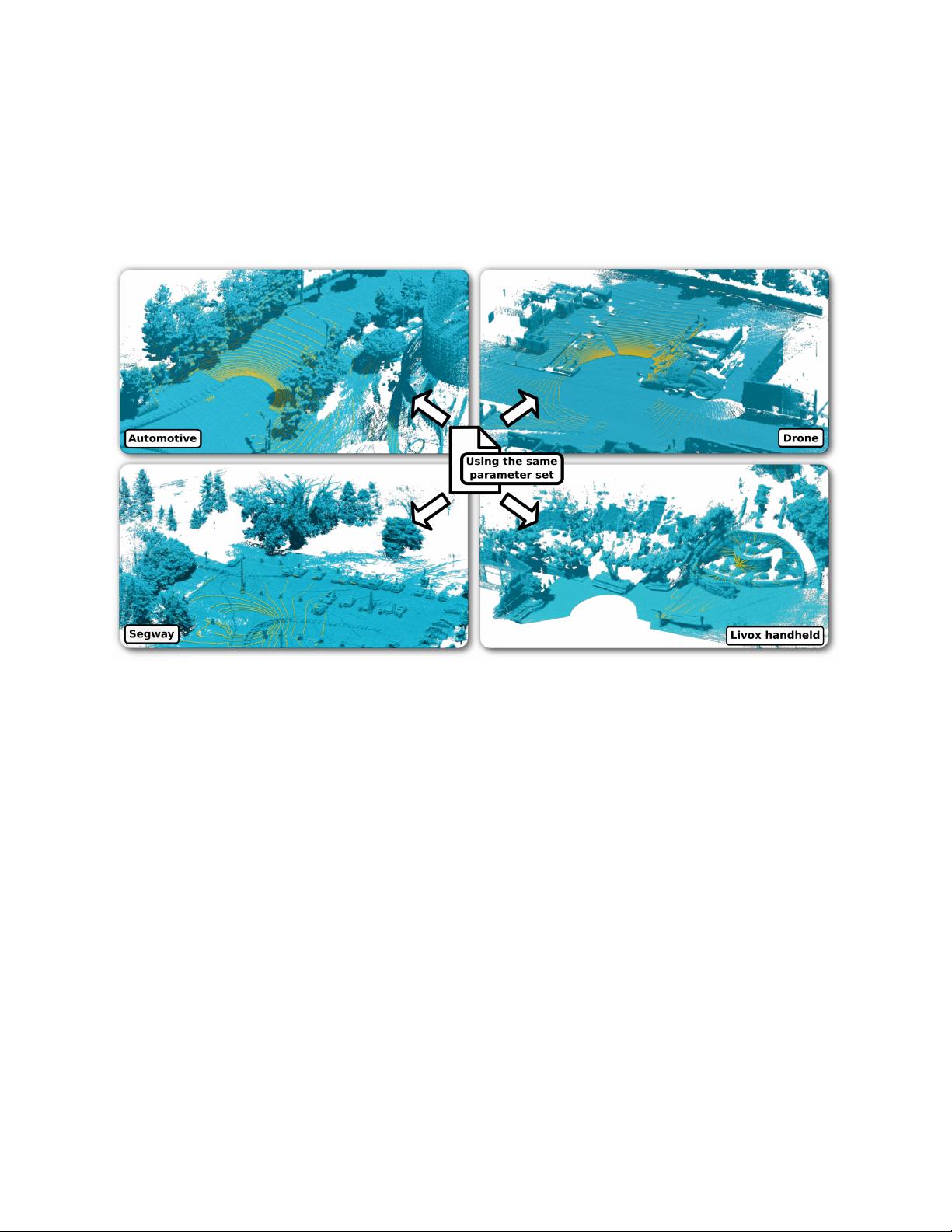
Fig. 1: Point cloud maps (blue) generated by our proposed odometry pipeline on different datasets with the same set of parameters. We depict
the latest scan in yellow. The scans are recorded using different sensors with different point densities, different orientations, and different
shooting patterns. The automotive example stems from the MulRan dataset [15]. The drone of the Voxgraph dataset [23] and the segway
robot used in the NCLT dataset [5] show a high acceleration motion profile. The handheld Livox LiDAR [17] has a completely different
shooting pattern than the commonly used rotating mechanical LiDAR.
Abstract—Robust and accurate pose estimation of a robotic
platform, so-called sensor-based odometry, is an essential part
of many robotic applications. While many sensor odometry
systems made progress by adding more complexity to the ego-
motion estimation process, we move in the opposite direction. By
removing a majority of parts and focusing on the core elements,
we obtain a surprisingly effective system that is simple to realize
and can operate under various environmental conditions using
different LiDAR sensors. Our odometry estimation approach
relies on point-to-point ICP combined with adaptive thresholding
for correspondence matching, a robust kernel, a simple but
widely applicable motion compensation approach, and a point
cloud subsampling strategy. This yields a system with only a few
parameters that in most cases do not even have to be tuned
to a specific LiDAR sensor. Our system performs on par with
state-of-the-art methods under various operating conditions using
different platforms using the same parameters: automotive plat-
forms, UAV-based operation, vehicles like segways, or handheld
LiDARs. We do not require integrating IMU data and solely rely
on 3D point clouds obtained from a wide range of 3D LiDAR
sensors, thus, enabling a broad spectrum of different applications
and operating conditions. Our open-source system operates faster
than the sensor frame rate in all presented datasets and is
designed for real-world scenarios.
Index Terms—Mapping; Localization; SLAM
I. INTRODUCTION
O
DOMETRY estimation is an essential building block for
any mobile robot that needs to autonomously navigate in
unknown environments. In the LiDAR sensing domain, current
odometry pipelines typically use some form of iterative closest
point (ICP) to estimate poses incrementally [10], [26], [31],
[35]. Even though LiDAR odometry has been an active area
of research for the last three decades, the design of current
systems is usually coupled with assumptions about the robot
motion [10] and the structure of the environment [28] to
Manuscript received: September 14, 2022; Revised: December 5, 2022; Ac-
cepted: December 27, 2022. This paper was recommended for publication by
Editor Javier Civera upon evaluation of the Associate Editor and Reviewers’
comments.
This work has partially been funded by the Deutsche Forschungsge-
meinschaft (DFG, German Research Foundation) under Germany’s Excel-
lence Strategy, EXC-2070 – 390732324 – PhenoRob and by the European
Union’s HORIZON research and innovation programme under grant agree-
ment No 101070405 (Digiforest).
All authors are with the University of Bonn, Germany. Cyrill Stachniss is
additionally with the Department of Engineering Science at the University of
Oxford, UK, and with the Lamarr Institute for Machine Learning and Artificial
Intelligence, Germany.
Digital Object Identifier (DOI): see top of this page.
资源评论













