Texture-GS原文
需积分: 0 29 浏览量
2024-05-27
14:19:15
上传
评论
收藏 10.04MB PDF 举报


Texture-GS: Disentangling the Geometry and
Texture for 3D Gaussian Splatting Editing
Tian-Xing Xu
1
, Wenbo Hu
2†
, Yu-Kun Lai
3
, Ying Shan
2
, and Song-Hai Zhang
1†
1
Tsinghua University, China
xutx21@mails.tsinghua.edu.cn,shz@tsinghua.edu.cn
2
Tencent AI Lab, China
wbhu@tencent.com,yingsshan@tencent.com
3
Cardiff University, United Kingdom
LaiY4@cardiff.ac.uk
Abstract. 3D Gaussian splatting, emerging as a groundbreaking ap-
proach, has drawn increasing attention for its capabilities of high-fidelity
reconstruction and real-time rendering. However, it couples the appear-
ance and geometry of the scene within the Gaussian attributes, which
hinders the flexibility of editing operations, such as texture swapping.
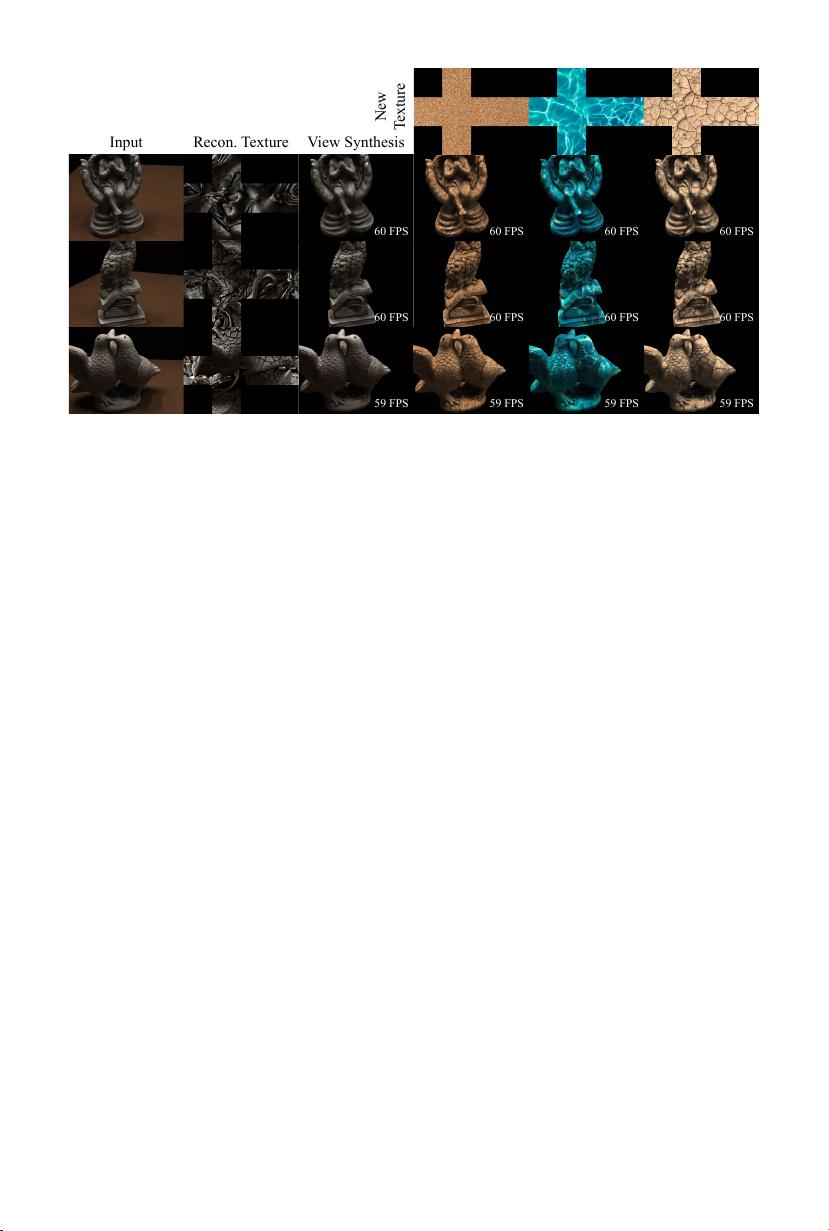
To address this issue, we propose a novel approach, namely Texture-GS,
to disentangle the appearance from the geometry by representing it as a
2D texture mapped onto the 3D surface, thereby facilitating appearance
editing. Technically, the disentanglement is achieved by our proposed
texture mapping module, which consists of a UV mapping MLP to learn
the UV coordinates for the 3D Gaussian centers, a local Taylor expan-
sion of the MLP to efficiently approximate the UV coordinates for the
ray-Gaussian intersections, and a learnable texture to capture the fine-
grained appearance. Extensive experiments on the DTU dataset demon-
strate that our method not only facilitates high-fidelity appearance edit-
ing but also achieves real-time rendering on consumer-level devices, e.g .
a single RTX 2080 Ti GPU.
Keywords: Neural rendering · Scene editing · Novel view synthesis ·
Gaussian splatting · Texture mapping · Disentanglement
1 Introduction
Reconstruction, editing, and real-time rendering of photo-realistic scenes are fun-
damental problems in computer vision and graphics, with diverse applications
such as film production, computer games, and virtual/augmented reality. Polyg-
onal meshes have served as the standard 3D representation within traditional
rendering pipelines, owing to their rendering speed and editing flexibility (with
texture mapping).
Due to the laborious process of manual mesh-based scene modeling, 3D Gaus-
sian Splatting [13] (3D-GS) has gained considerable attention for its capability
†
Corresponding authors.
arXiv:2403.10050v1 [cs.CV] 15 Mar 2024

剩余19页未读,继续阅读
资源评论













