
C#⼯控上位机实例_「C#上位机」西门⼦1200PLC实⽤定位
控制程序案例
1. 引⾔引⾔
本⽂是⼀篇综合性⾮常强的⽂章,从PLC输⼊输出及步进电机接线开始,到PLC运动控制程序编写,再到后续的ModbusTCP通信协议及上
位机编程实现最终控制,涉及知识⾯⽐较⼴,能够让我们很好地将所学知识结合起来。
2. 项⽬开发平台项⽬开发平台
采⽤西门⼦TIA Portal V15编程软件编写运动控制程序,实现PLC(S7-1200系列:CPU1214C DC/DC/DC )对步进电机的控制,再通
过编写ModbusTCP程序,将控制地址进⾏映射,从⽽⽅便上位机(VS 2019开发)与PLC进⾏通信,最终实现步进电机的运动⽅向、速度
及距离的灵活控制。
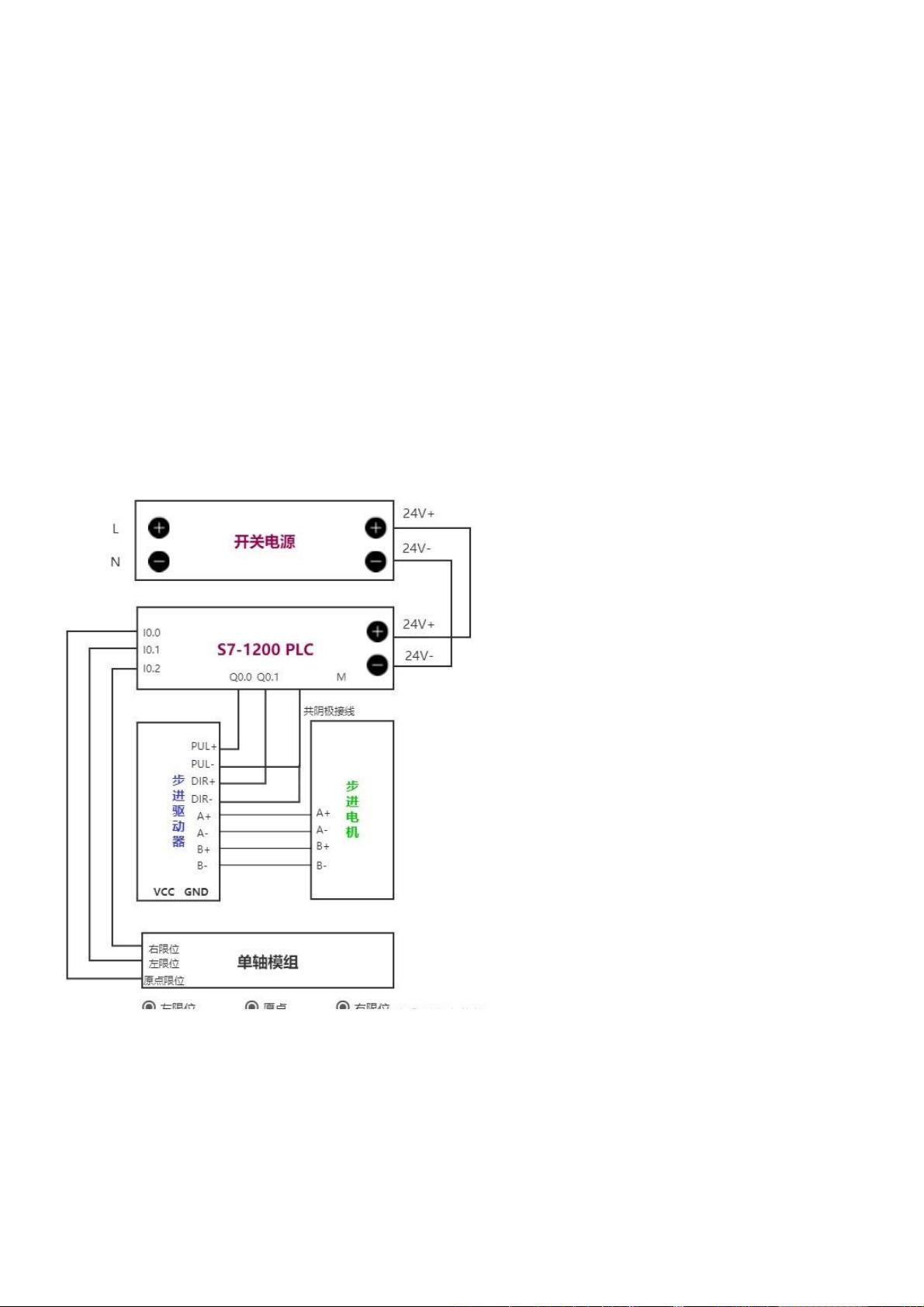
涉及硬件:开关电源、S7-1200PLC、步进驱动器、步进电机、单轴模组、限位开关
涉及软件:TIA Portal V15、VS2019、ModbusPoll(⽤于测试通信)
3. 硬件接线硬件接线
4. PLC编程

_webkit
- 粉丝: 31
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



- 1
- 2
- 3
前往页