
# Rotoye Batmon
## _The Dumb-Battery Era is Over_
## Getting Started
When you receive a battery with integrated BATMON, the OLED display (if applicable) and red/green LED's should be flashing periodically, displaying the battery state of charge, the min and max cell voltages, and current in Amps. The button is used to cycle through screens.
_**If you see the < ! > symbol on the OLED display, this means that one or more safety warning conditions have been met. Press the button to see the warning(s) present.**_
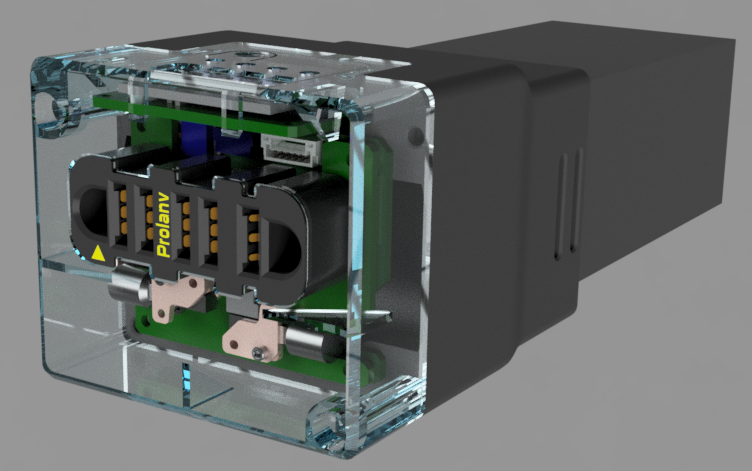
### Buzzer/OLED board
The optional OLED display/buzzer attachment extends BATMON functionality by providing a user-friendly interface for displaying state of charge, voltages, warnings, and more. The small board is attached to the main BATMON board via a flex connector. This connector is rated for a limited number of plug-unplug cycles. It is recommended to attach/detach this accessory as little, and as carefully as possible.
## Interfacing with an Autopilot
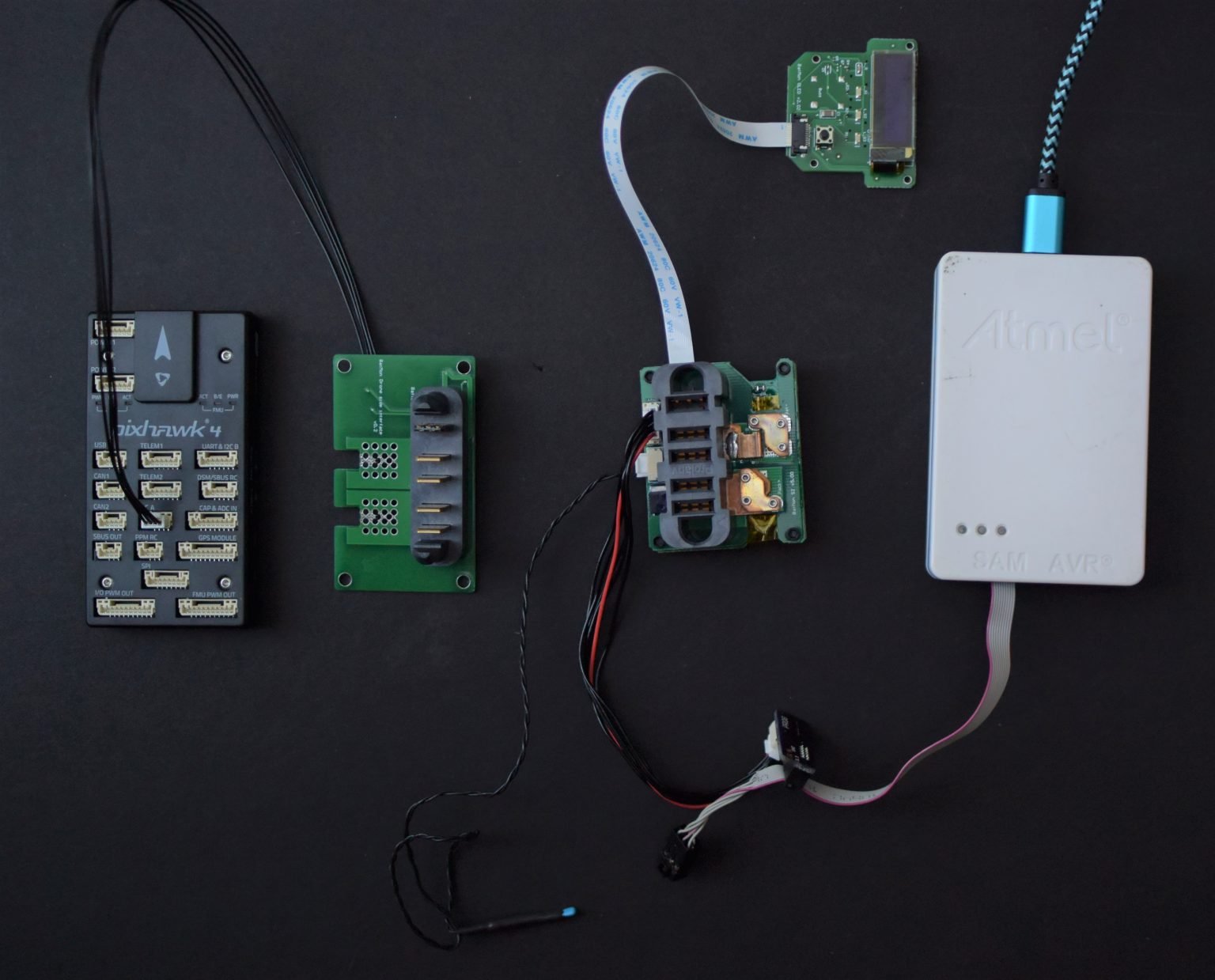
### Wiring to autopilot
### Wiring to cells
Ensure that you have received BATMON with the right cell count as your batteries. You may connect the JST balance leads of a battery to BATMON to power it up. Ensure that the negative of the battery is connected to the negative terminal on the power board(the top board with the Prolanv connector). You'd need this connection to power up BATMON even if you are just testing the board.
### PX4
#### Stable
BATMON is supported on the stock firmware of PX4 since the [v1.12.2](https://github.com/PX4/PX4-Autopilot/releases/tag/v1.12.2) version.
Connect SMBUS/I2C of BATMON to the appropriate bus on the autopilot.
In ground control software of choice, set
- BAT_SOURCE parameter to "External"
- BATMON_DRIVER_EN to 1
Start BATMON on nsh using the script:
`batmon start -X` * Search all the external bus and connect to the first BATMON detected
`batmon start -X -b 1 -a 11` * External bus 1, address 0x0b
`batmon start -X -b 1 -a 12` * External bus 1, address 0x0c

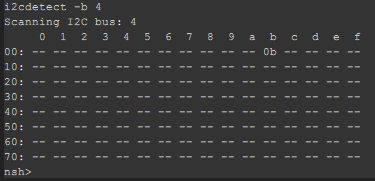
I2C devices connected on the different bus can be identified by running nsh script:
`i2cdetect -b <bus number>`
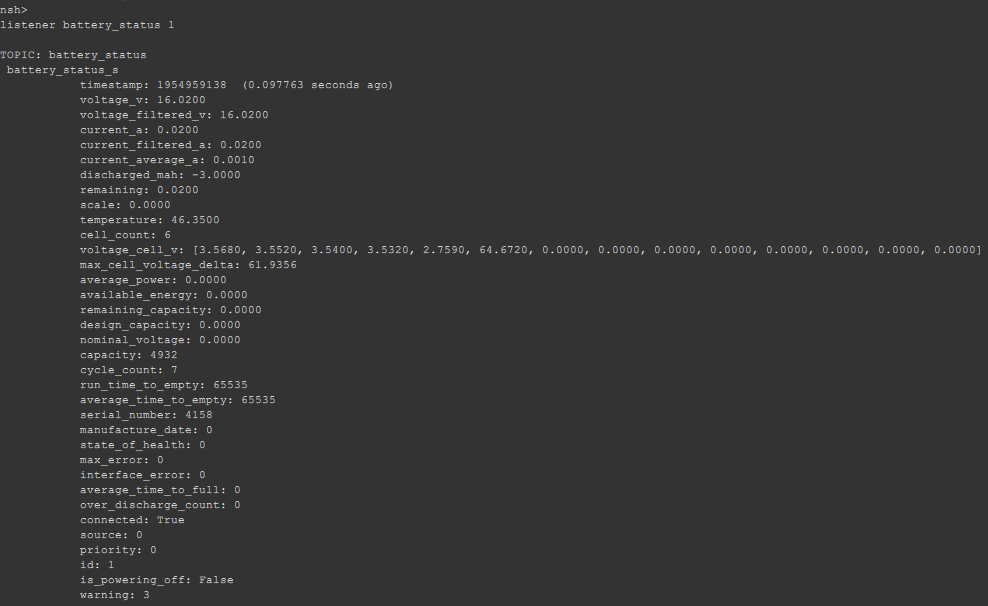
*battery_status* uorb messages may be inspected using the command
`listener battery_status 1`
### Ardupilot
Clone or download [Ardupilot firmware](https://github.com/ArduPilot/ardupilot)
Check out the master branch, [build from source](https://ardupilot.org/dev/docs/building-the-code.html), and flash the firmware. **BATMON support is not yet in a stable release of Ardupilot.**
In ground control software of choice, manually set the BATTx_MONITOR parameter to 19 (or select Rotoye by name, if enumerated), and select the appropriate BATTx_BUS (0-3), where *x* is the Batt number (multiple Smart Batteries can be used at once!)
See the [full list](https://ardupilot.org/copter/docs/parameters.html#batt2-parameters) of parameters for more detail [](https://camo.githubusercontent.com/4e0d13de8634b0ae88226aba1f015ae81a342f7f/68747470733a2f2f6c68362e676f6f676c6575736572636f6e74656e742e636f6d2f6a477257786b4d4b6f384e495f49764f6d6d665a6a334f6c644b4537477051666c5253756c6f45514b3652456b30797a47325a6e717244506f6d48565479574d68386e7447594838476c533139774d5f736d6c4438495732717a6e324f544d4346756d772d7243674e4c2d46496936596b7032785f717853724a506a7337316d747573564d336454)
### Ground Control:
You should now be able to verify through a tool such as MAVLink Inspector in QGroundControl that Batmon is sending data to the autopilot: [](https://camo.githubusercontent.com/b2bfaff53eeb6a400d0f91813a3dc36f3d63df9a/68747470733a2f2f6c68352e676f6f676c6575736572636f6e74656e742e636f6d2f56304a737455317947524632544435665f6a4730725464314730414f64796c6e4261334d786b454257444472425549396d687563714430794c5936506b4c38614d49694e67734f4a77345576334a5054476753562d336e4d647045595f796f4d6a6c692d79725044547165346c315268534d697044694b6478314c643964465171676a3061334c7a)
## Arduino Library:
### ReadBatmon: Arduino code to access the Batmon battery monitor.
Instruction to run ReadBatmon
- Copy the ReadBatmon folder to local directory.
- Open the sketch using Arduino IDE.
- Open Sketch->Include Library-> Add .ZIP library
- Give location of FastCRC.zip file. The FastCRC library would now be added.
- Connect the Power, GND, SDA, SCL lines from Arduino to Batmon
- Connect the cells to BATMON
- Upload code to Arduino
- Run serial monitor to see output

 batmon_reader-master.zip (8个子文件)
batmon_reader-master.zip (8个子文件)  batmon_reader-master Tutorials running_multiple_batmons
batmon_reader-master Tutorials running_multiple_batmons  README.md 2KB programming_tutorial README.md 3KB ReadBatmon Batmon.cpp 10KB
README.md 2KB programming_tutorial README.md 3KB ReadBatmon Batmon.cpp 10KB FastCRC.zip 35KB ReadBatmon.ino 5KB Batmon.h 821B Batmon_struct.h 9KB README.md 6KB
FastCRC.zip 35KB ReadBatmon.ino 5KB Batmon.h 821B Batmon_struct.h 9KB README.md 6KB资源评论


快撑死的鱼
- 粉丝: 2w+
- 资源: 9155

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- 机器学习-bert模型
- 【毕业设计】基于Python的Django-html基于语音识别的智能垃圾分类系统源码(完整前后端+mysql+说明文档+LW+PPT).zip
- ERA5再分析数据根区土壤水分下载_era5土壤湿度-CSDN博客.html
- 【毕业设计】基于Python的Django-html基于小波变换的数字水印研究系统源码(完整前后端+mysql+说明文档+LW+PPT).zip
- 【毕业设计】基于Python的Django-html基于知识图谱的百科知识问答平台源码(完整前后端+mysql+说明文档+LW+PPT).zip
- 【毕业设计】基于Python的Django-html开放领域事件抽取系统源码(完整前后端+mysql+说明文档+LW+PPT).zip
- 【毕业设计】基于Python的Django-html旅游城市关键词分析系统源码(完整前后端+mysql+说明文档+LW+PPT).zip
- 【毕业设计】基于Python的Django-html基于知识图谱的医疗问答系统源码(完整前后端+mysql+说明文档+LW+PPT).zip
- 【毕业设计】基于Python的Django-html某大学学生影响力分析系统源码(完整前后端+mysql+说明文档+LW+PPT).zip
- Unity RPG地图场景资源
- 【毕业设计】基于Python的Django-html棉花数据平台建设与可视化系统源码(完整前后端+mysql+说明文档+LW+PPT).zip
- hymenoptera-data 数据集
- Java I/O流及其应用详解:字节流、字符流及相关工具类全面解析
- 机器学习-apriori算法-超市关联分析
- 【毕业设计】基于Python的Django-html企业物流管理系统源码(完整前后端+mysql+说明文档+LW+PPT).zip
- 【毕业设计】基于Python的Django-html某医院体检挂号系统源码(完整前后端+mysql+说明文档+LW+PPT).zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


