What Has Defined Visual SLAM for me?
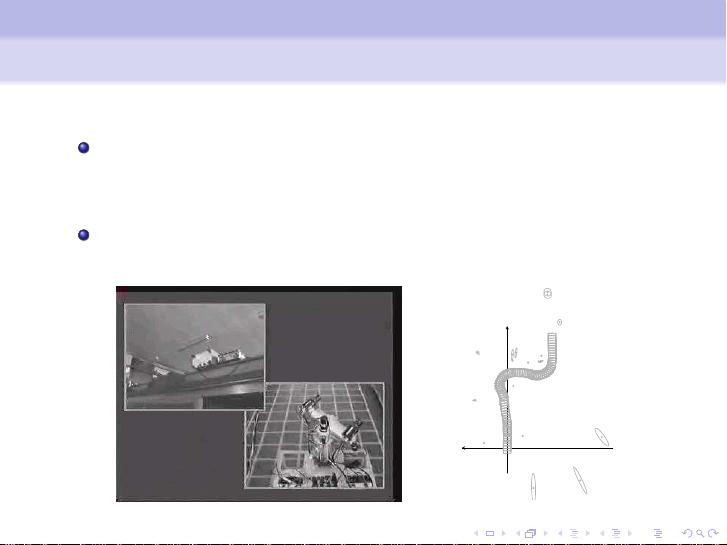
Closed loop estimation, predictive, efficient.
Live demos!
Focus on a single visual sensor in a small area; drift-free,
consistent localisation.
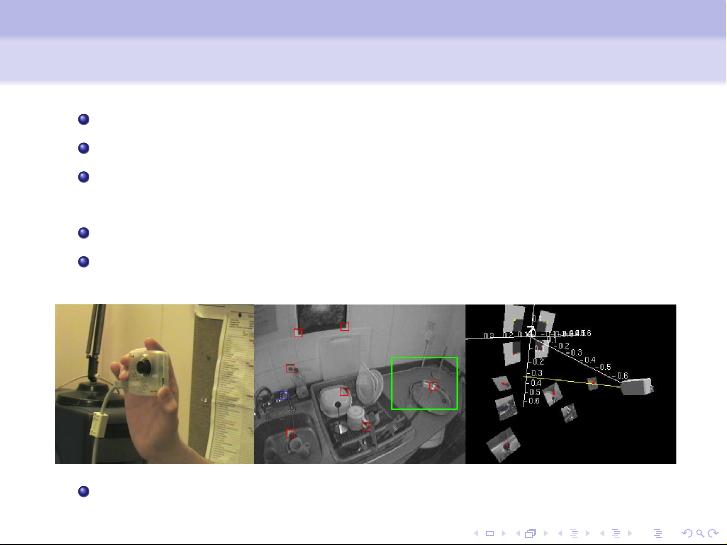
Many possible applications easily apparent.
Commodity hardware (cameras and processors); open
source software.
I believe that this research is evolving towards general
real-time spatial perception (but that it’s still SLAM!)