
1
从局部增量到全局平均的并行 SfM 方案
Siyu Zhu Tianwei Shen Lei Zhou
Runze Zhang Jinglu Wang Tian Fang Long Quan
香港科技大学
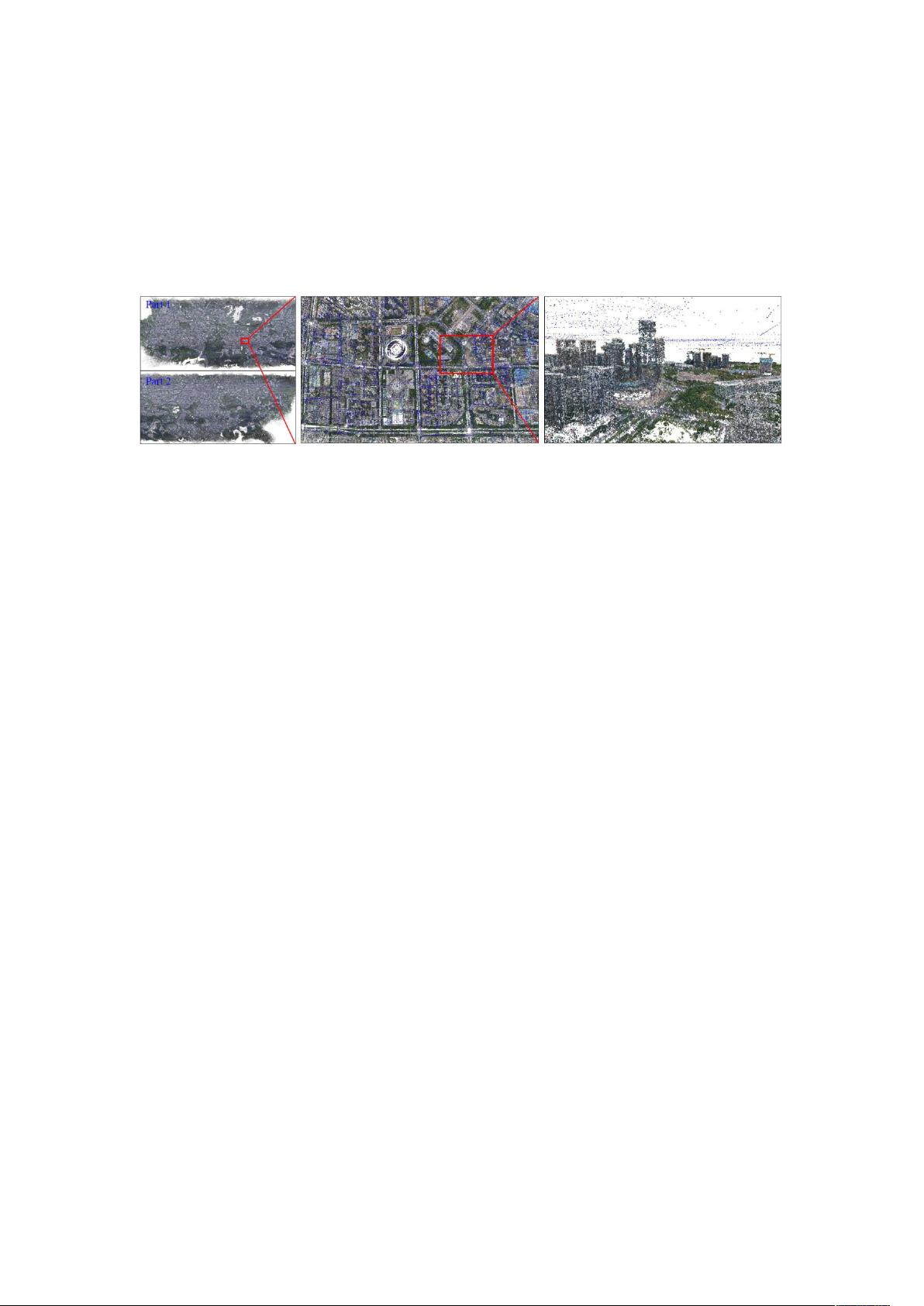
图 1:我们的可扩展并行 SfM 系统从 5000 万像素的高分辨率图像中恢复了一个中型城市的 121 万个相
机姿态(用蓝点标记)和 16.8 亿个稀疏的 3D 点。从左到右依次放大图像最终我们可以看到标志性建
筑。
摘要
本文解决了 SfM 的精确性和稳定性问题,尤其是在进行相机配准时,大大超过了并计
算时单台计算机的内存。与以往大大简化 SfM 的参数,牺牲最终的重建精度的方法不同,
我们试图提出一种相机聚类算法,来将一个大的 SfM 问题根据具有重叠的相机群将问题划
分为较小的子问题,从而保持相机之间的连通性。然后,我们利用混合公式,将局部增量
SfM 的相对姿态应用到全局运动平均框架中并生成精确、一致的全局相机姿态。我们的相
机群可扩展公式非常适用于整个 SfM 方案,包括轨迹生成、局部 SfM、三维点的三角测量
和 BA 优化。我们甚至能够重建包含 100 多万幅高分辨率图像的城市数据集的相机姿态,
将这些姿态在标准数据及、互联网数据集以及顺序数据集上进行评估,结果表明具有较高
的精度和较好的鲁棒性。
1.引言
著名的大规模 SfM 方法 [1,16,25,27,43,46]已经在特征提取[31,55]、重叠图像检
测[1,16,25,37]、特征匹配和验证 [56]、BA 优化[13,35,57]等方面提供了巧妙的设计。
然而,精确、连续地进行大规模相机配准问题还没有完全解决,更不用说以并行的方式进
行。
为了在一台计算机中解决整个相机配准问题,先前的工作[1,16,25,43,46]通常首先
会彻底地丢弃相机和轨迹之间的关联性来构建一个标志性图像的骨骼几何结构 [30],然后

剩余14页未读,继续阅读
资源评论


lovotte
- 粉丝: 2
- 资源: 3









最新资源
- 基于springboot的智能无人仓库管理源码(java毕业设计完整源码+LW).zip
- 机械设计油箱密封试验机sw20项目全套技术资料.zip
- Spirent-TestCenter-Automation-Obj-Ref
- 基于springboot的在线考试与学习交流网页平台源码(java毕业设计完整源码+LW).zip
- 大规模用户运营体系搭建.pdf
- 数据资产化框架.pdf
- 数字化时代产业内容资产管理平台-业务架构.pdf
- 苏宁科技集团智慧零售方案.pdf
- 中国金融体系指标大全(2024年版)(77页).pdf
- 雪亮工程解决方案.pdf
- 基于springboot的常规应急物资管理系统源码(java毕业设计完整源码+LW).zip
- Spirent-TestCenter-Automation-Conf-Obj-Ref
- 基于springboot的线上辅导班系统的开发与设计源码(java毕业设计完整源码+LW).zip
- Spirent-TestCenter-Automation-Prog-Guide
- 计算机十进制转换成二进制详细步骤(手工计算).zip
- 基于springboot的医院资源管理系统源码(java毕业设计完整源码+LW).zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


