第六章 跑马灯实验STM32F4开发指南正点原子探索者STM32开发板.pdf
版权申诉
100 浏览量
2023-06-06
21:10:22
上传
评论
收藏 1.7MB PDF 举报


STM32F4 开发指南(库函数版)
ALIENTEK 探索者 STM32F407 开发板教程
141
第六章 跑马灯实验
任何一个单片机,最简单的外设莫过于 IO 口的高低电平控制了,本章将通过一个经典的
跑马灯程序,带大家开启 STM32F4 之旅,通过本章的学习,你将了解到 STM32F4 的 IO 口作
为输出使用的方法。在本章中,我们将通过代码控制 ALIENTEK 探索者 STM32F4 开发板上的
两个 LED:DS0 和 DS1 交替闪烁,实现类似跑马灯的效果。 本章分为如下四个小节:
6.1, STM32F4 IO 口简介
6.2, 硬件设计
6.3, 软件设计
6.4, 下载验证
6.1 STM32F4 IO 简介
本章将要实现的是控制 ALIENTEK 探索者 STM32F4开发板上的两个 LED 实现一个类似跑
马灯的效果,该实验的关键在于如何控制 STM32F4 的 IO 口输出。了解了 STM32F4 的 IO 口如
何输出的,就可以实现跑马灯了。通过这一章的学习,你将初步掌握 STM32F4 基本 IO 口的使
用,而这是迈向 STM32F4 的第一步。
这一章节因为是第一个实验章节,所以我们在这一章将讲解一些知识为后面的实验做铺垫。
为了小节标号与后面实验章节一样,这里我们不另起一节来讲。
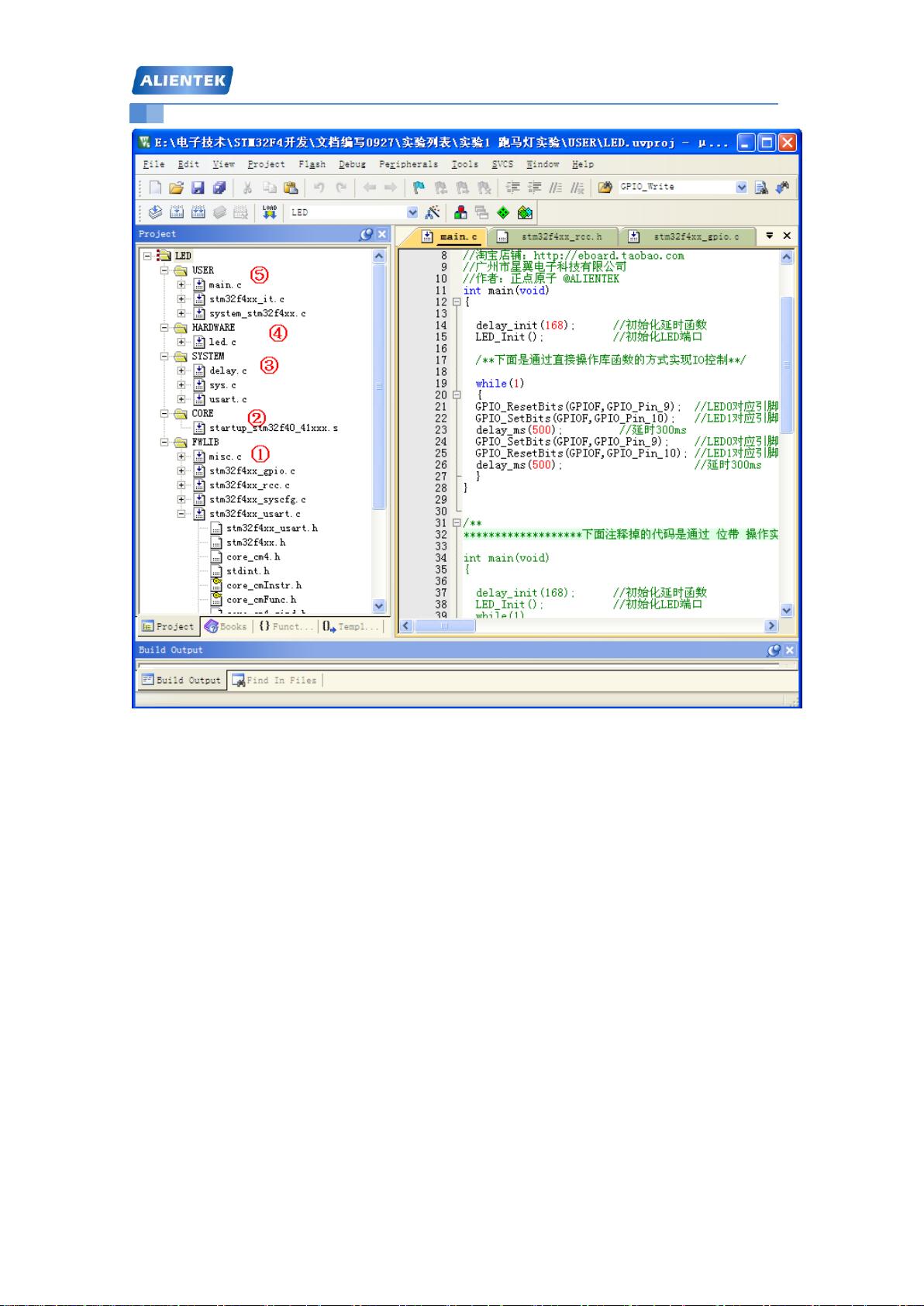
在讲解 STM32F4 的 GPIO 之前,首先打开我们光盘的第一个固件库版本实验工程跑马灯实
验工程(光盘目录为:“4,程序源码\标准例程-库函数版本\实验 1 跑马灯/USER/ LED.uvproj”),
可以看到我们的实验工程目录:



剩余22页未读,继续阅读
资源评论


oligaga
- 粉丝: 52
- 资源: 2万+











