

课程设计任务书
10/11 学年第 一 学期
学 院:
专 业:
学 生 姓 名: 学 号:
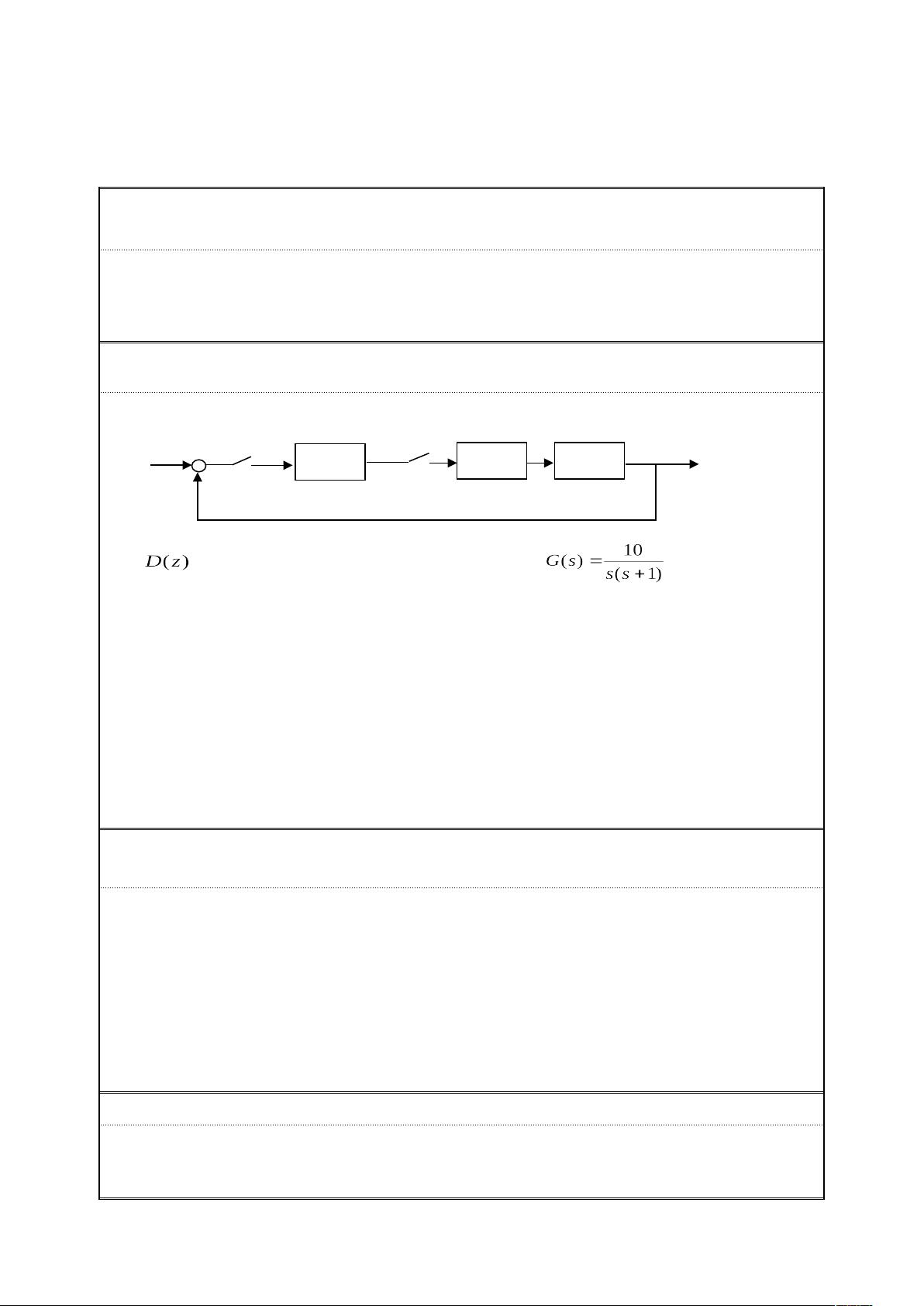
课程设计题目:
起 迄 日 期:
课程设计地点:
指 导 教 师:
系 主 任:
下达任务书日期: 2011 年 12 月
1
剩余14页未读,继续阅读
资源评论

 Starry_wt2024-11-14资源很赞,希望多一些这类资源。
Starry_wt2024-11-14资源很赞,希望多一些这类资源。 2301_768893672024-07-17感谢资源主分享的资源解决了我当下的问题,非常有用的资源。
2301_768893672024-07-17感谢资源主分享的资源解决了我当下的问题,非常有用的资源。
omyligaga
- 粉丝: 97
- 资源: 2万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- 人物检测26-YOLO(v5至v11)、COCO、CreateML、Paligemma、TFRecord、VOC数据集合集.rar
- 人和箱子检测2-YOLO(v5至v11)、COCO、CreateML、Paligemma、TFRecord、VOC数据集合集.rar
- 清华大学2022年秋季学期 高等数值分析课程报告
- GEE错误集-Cannot add an object of type <Element> to the map. Might be fixable with an explicit .pdf
- 清华大学2022年秋季学期 高等数值分析课程报告
- 矩阵与线程的对应关系图
- 人体人员检测46-YOLO(v5至v9)、COCO、Darknet、TFRecord数据集合集.rar
- GEMM优化代码实现1
- java实现的堆排序 含代码说明和示例.docx
- 资料阅读器(先下载解压) 5.0.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


