

1 Introduction
The speed control circuits of DC motors are simple and easy
to use, and hence are very popular in motor speed control
systems. However, due to the brushes, DC motors suffer from
a lower reliability. The brushless DC (BLDC) motor is also
referred as an electronically commuted motor. There are no
brushes on the rotor and the commutation is performed
electronically at certain rotor positions.
Replacing a DC motor with a BLDC motor places higher
demands on a control algorithm and a control circuit.
• First, the BLDC motor is usually a three-phase system;
so, it has to be powered by a three-phase power supply.
• Second, the rotor position must be known at certain
angles in order to align the applied voltage.
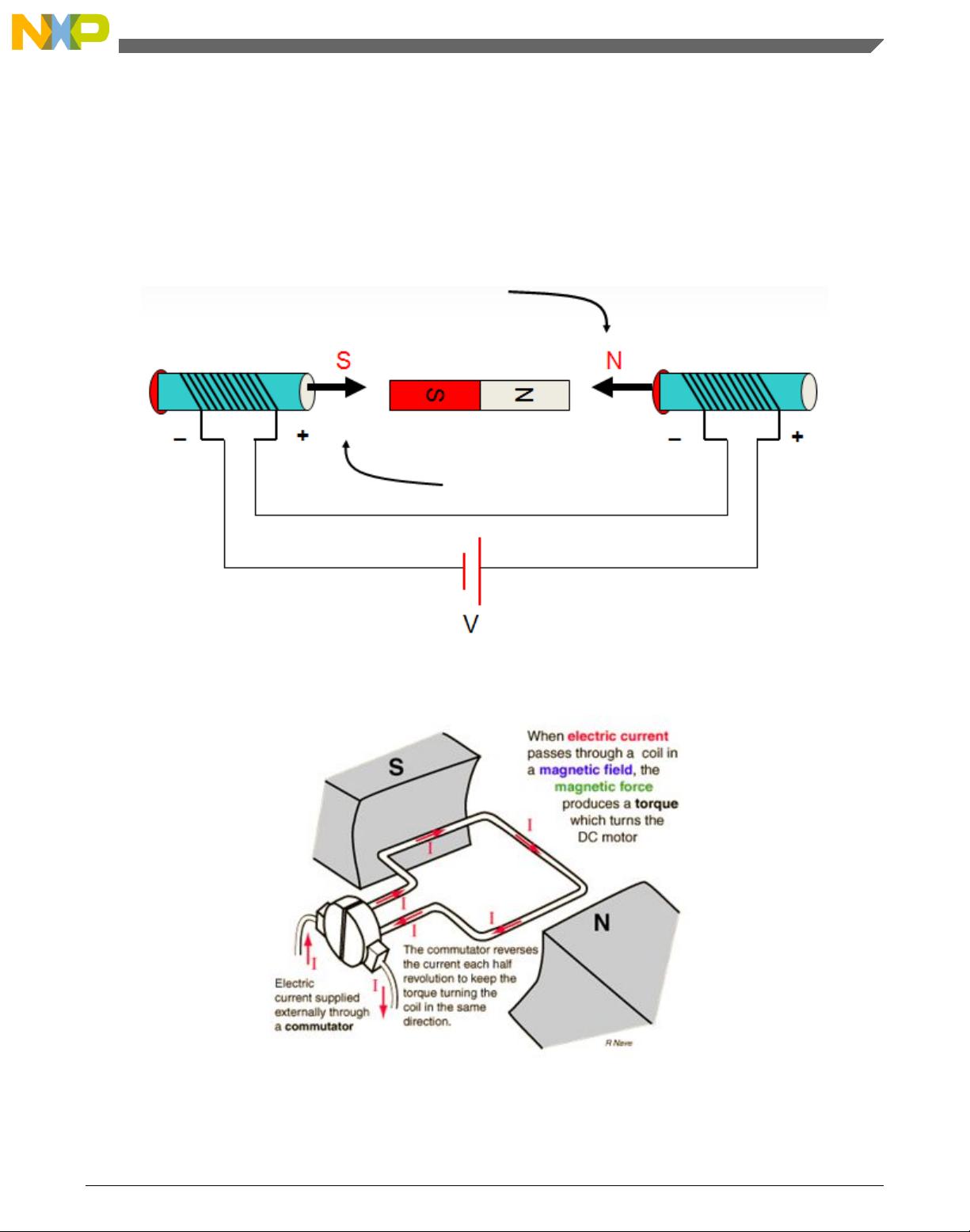
The most common way to control a BLDC motor is to use
Hall sensors to determine the rotor position. The control
system senses the rotor position and the proper voltage pattern
is applied to the motor.
This application note describes the basic DC and BLDC motor
theory and the implementation of the six-step commutation
method on KE02 sub-family MCUs. KE02 is a 5 V MCU with
enhanced FlexTimer(FTM), suitable for BLDC motor control.
Freescale Semiconductor
Document Number:AN4776
Application Note
Rev 0, 07/2013
BLDC Motor Control with Hall
Sensors Based on FRDM-KE02Z
by:
Xianhu Gao
© 2013 Freescale Semiconductor, Inc.
Contents
1 Introduction................................................................1
2 Basic theory of motor control...................................2
3 Basic theory of six-step commutation
method.......................................................................6
4 How to control BLDC motor with
FRDM-KE02Z ........................................................10
5 Conclusion...............................................................14
6 References...............................................................14
7 Revision history......................................................15

剩余15页未读,继续阅读
资源评论


oja911
- 粉丝: 3
- 资源: 19









最新资源
- 利用javascript创建页面,并实现发送网络请求
- 58 -主持人聘任合同.docx
- 02-涉外劳动技术服务合同.docx
- 03-中外劳务合同.docx
- 05-国际劳动合同【附公证书】.docx
- 04-中外劳动技术服务合同.docx
- 07-国际劳动合同【劳务派遣】.docx
- 08-国际劳务合同【有见证人】.docx
- MATLAB代码:基于主从博弈理论的共享储能与综合能源微网优化运行研究 关键词:主从博弈 共享储能 综合能源微网 优化调度 仿真平台:MATLAB yalmip+cplex 主要内容:代码主要做的是
- 附属文件-05-续订劳动合同意向通知书及回执.docx
- 附属文件-02-劳动合同到期人员续签审批表.xlsx
- 附属文件-03-劳动合同签收备案表.xlsx
- 附属文件-01-变更劳动合同协议书.docx
- 附属文件-04-劳动合同终止办理情况登记表.docx
- 附属文件-07-终止劳动合同通知书.docx
- 各类合同(协议)-04-外籍员工雇佣合同.docx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


